The future of horticultural mechanization
|
|
|
- Alexina Wilcox
- 5 years ago
- Views:
Transcription



1 New technologies and services for agricultural machinery: challenges and limits November 2018 Bologna, Italy The future of horticultural mechanization Silvana Nicola University of Turin, Department of Agricultural, Forest and Food Sciences (Turin), Italy. Silvana Nicola ISHS Past Vice President ISHS Secretary




2 Introduction: horticulture







3 PAST PRESENT FUTURE.? What is the future of horticulture?






4 Horticulture is a complex system because of the diverse cultural systems, great variety of species and cultivars, and extended large variability of soil and climatic conditions


5 Horticulture is not only about hard labor and dependent on the vagaries of climate 28 th Members Meeting of the Club of USA Bologna




6 Horticulture is also high tech production 28 th Members Meeting The of Netherlands Club of Bologna






7 Horticulture is standardized propagation and intensive production 28 th Members Meeting The of Netherlands Club of Bologna

8 Transplant production was in the farm





9 Horticulture is now an impressive nursery industry 28 th Members Meeting The of Netherlands Club of Bologna




10 Covers were basic and inefficient






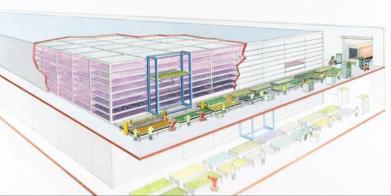
11 Italy Horticulture is now an intensive protected production Turkey Spain


12 Where is automation in Horticulture?


13 Automation is in the nursery industry


14 From manual grafting




15 To automatic grafting


16 Planting in the past





17 Planting


18 Advanced Planting


19 Production Gutters automatically lift


20 Production




21 Harvesting



22 Harvesting baby-leaf salad in the greenhouse HORTECH Horticultural Technology Slide adapted from Errol W. Hewett, Massey University


23 Harvesting baby leaf vegetables in the field HORTECH Horticultural Technology Slide adapted from Errol W. Hewett, Massey University


24 Harvesting Lettuce harvesting and field packing Tomato for processing harvesting Slide adapted from Errol W. Hewett, Massey University


25 Tomato harvesters CTM self propelled tomato harvester Slide adapted from Errol W. Hewett, Massey University Johnston self propelled tomato harvester




26 Automation is in postharvest handling facilities 28 th Members Meeting of the Club Kenya of Bologna



27 Automation is in processing facilities


28 Automation is in processing facilities La Linea Verde, Italy
29 Why and what in the future?
30 Are fruit and vegetables too cheap! Slide courtesy of Errol W. Hewett, Massey University
31 Labor a major cost for horticulture Nearly 50% of production costs for fruit are for hired labor Intensive horticultural crops require much more skilled labor than broad scale agriculture Slide courtesy of Errol W. Hewett, Massey University
32 Drivers for mechanization and automation Labor problems - a major driver for increased automation and mechanization. Cost of labor is it really too high? Minimum wage is $ /hour? USA has lowest minimum federal wage in OECD countries. Availability of skilled labor not always available when needed. Mechanization will reduce crop losses by harvesting when product is ready. Machines with sensors are objective and product throughput can be consistently monitored. Uniform quality of output. Competition in production from low cost labor countries will drive innovative technology to increase profits. Slide courtesy of Errol W. Hewett, Massey University

33 Example: Harvesting is labor intensive Availability crop must be harvested at optimum maturity. Seasonality Skilled harvest hands understand fragility of product Humans harvest faster than machines for many crops Potential to reduce labor costs with machines Will changes in immigration laws in many countries affect labor market? Slide adapted from Errol W. Hewett, Massey University
34 Robots in Horticulture: several uses Nurseries and greenhouses Parks and golf courses In the field; monitoring Mechanical aids Mechanization and machines Postharvest * Picking/harvesting * Grading and sorting * Packing * Accumulation Slide adapted from Errol W. Hewett, Massey University


35 Many types of robots Communication robots; no hands so no use in horticulture Slide adapted from Errol W. Hewett, Massey University
36 Future: smart machines Small autonomous machines would be more efficient to replace the traditional large tractors. ADVANTAGES: able to carry out useful tasks all year round unattended able to behave sensibly in a semi-natural environment over long periods of time less environmental impact replacing the over-application of chemicals and fertilizers requiring lower usage of energy better control matched to requirements causing less soil compaction due to lighter weight

")

37 Prototypes MF-Scamp robots for scouting (Designed by Blackmore. Copyright 2008 AGCO Ltd) Autonomous Plant Inspection (API) Research Platform designed by Danish institute of Agricultural Science (DIAS)


 Robotrac by")
38 MF-Scamp robots for weeding and harvesting (Designed by Blackmore. Copyright 2008 AGCO Ltd) Robotrac by Valtra. Remote controlled



39 Harvester robot

40 Microbots for pathogen control? Microbots for disease control Systemic distribution of selective natural biocides through vascular system Targeting viruses, fungi or bacteria Nanotechnology has to be developed for plants Future applications? Slide adapted from Errol W. Hewett, Massey University


41 Advanced automatic vegetable grafting machines Cucurbit automatic grafting machine. 800 plants/hr at 95% success rate Tomato automatic grafting machine 1000 plants/hr at >95% rate


42 Greenhouse robot sprayers Worker safety and precision application Robot sprayer for greenhouses. Robotic sprayer Slide adapted from Errol W. Hewett, Massey University

43 Crop monitoring Octocopter Carries sensors and cameras for aerial surveillance Crop loads, stress conditions including water, nutrient, harvest maturity, pest and disease load Slide adapted from Errol W. Hewett, Massey University

44 Lettuce harvester Mainly for large growers >1,000 acres Can provide return on investment in 1 year Reduced labor costs by 50% Many processes automated increasing operator efficiency Slide adapted from Errol W. Hewett, Massey University

45 Instrumented glove for fruit quality Developed as harvesting aid by French scientists Equipped with nondestructive miniature sensors and artificial intelligence Measures color, sugars, firmness, Programmed to specific attributes and enables picker to make objective decisions. Not commercialized Slide adapted from Errol W. Hewett, Massey University

46 Harvesting aids Pneumatic branch shaker Used for cherries and apples Fruit falls onto collecting surface Physical damage an issue fruit hits branches, other fruit or surface of catching frame Slide adapted from Errol W. Hewett, Massey University

47 Strawberry robotic harvesting Fruit very perishable Physical damage a problem with mechanical harvesting Damage leads to ethylene production, to infection sites for fungi and rapid deterioration Selectivity challenge to find all berries on plant Cost and speed are ongoing issues Not commercial yet Slide adapted from Errol W. Hewett, Massey University

48 A modern packhouse

49 Automatic sorting of multiple quality attributes High tech sensors with very fast response times Fast, accurate segregation based on preset quality parameters size, density, shape, colour, surface defects, sugars. Measures 14 fruit per second per lane 10,080,000 individual fruit per 20 hour day for 10 lanes. No labor problems with machines


50 Increased automation Up to 10 lanes in large packhouses Robotic pallet wrapper


51 Robots in the packhouse Robotic pallet stacker Robotic bin stacker

52 Robotic fruit packing Mechanization will progress for harvesting and handling Robots will become more sophisticated and accurate for repetitive tasks Robots will become increasingly self learning adapting to changing conditions



53 Supply chain monitoring and traceability XSENSE system by Stepac [Now BT9 intelligent supply chain solutions] Records temperature and relative humidity automatically at short intervals for precise monitoring. Purfresh Transport Ozone technology for in transit preservation Constant storage remote environment monitoring and management



54 Autonomous robots in orchard Battery operated fully autonomous robot Programmed to travel each row using internal sensor package and smart software Scans vines to measure buds, flowers and fruitlets Calculates eventual crop load and yield. Targets flowers for pollen application Targets each fruit for remote harvesting Autonomous Multipurpose Mobile Platform for harvesting fruit (Photos from Robotics Plus Ltd. Te Puke, New Zealand.


55 Drones in horticulture Drones can measure soil conditions and plant growth and development Can plant seeds accurately Sensors can monitor status of plant minerals, soil water, light penetration, pest and disease load. Crops can be sprayed or fertiliser added only where needed and growth monitored.

56 Swarms of drones Potential to revolutionise horticulture? Hone in on target area. Map affected areas and bring in appropriate corrective solutions Measure plant status, moisture, mineral elements, growth, disease Remove weeds Spray chemicals very accurately

57 Conclusions Pressure will continue for producers to reduce costs of production, harvesting and packing produce. Supermarkets will continue to manipulate prices received for their benefit and not the producers. Are growers forced to sell produce too cheap? Labor costs will continue to increase and drive further mechanization, automation and robotics. Costs of technology reducing; more sophisticated, accurate and faster machines are being developed and functional robots are just around the corner for fruit and vegetable systems.

58 Conclusions Crucial that multidisciplinary research, involving plant scientists, engineers, food scientists, economists and marketing expertise is focused on creating new production systems. Innovation will come through intimate understanding of all parts of the system. Growing systems will be designed for specific crops and then dedicated machines will fit.


59 Thank you very much for your attention! To Nurture and Deploy Scientific Growing Knowledge For Creating a better World