High Accuracy PPU s. Capt. Joost Mulder Chairman Dutch Pilots Corporation (NLc) EMPA conference Bergen, Norway
|
|
|
- Dustin Evans
- 5 years ago
- Views:
Transcription
 EMPA conference Bergen, Norway")
1 High Accuracy PPU s and how they can improve safety in navigation and piloting Capt. Joost Mulder Chairman Dutch Pilots Corporation (NLc) EMPA conference Bergen, Norway
2 High Accuracy PPU s and how they can improve safety in navigation and piloting Introduction Laptop / tablet / phone Low end PPU High end PPU Developments

3 INTRODUCTION Joost Mulder Chairman Dutch Pilots Corporation Active Pilot in the Port of Rotterdam Dutch Pilots: Loodswezen Pilotage trips 450 pilots PPU s in use since





4 DUTCH PILOTAGE North P Amsterdam P Rotterdam P Schelde P








5 LAPTOP / TABLET / PHONE - Calculations Wind Pressure Deep Draught Channel Navigation & Emergency Manoeuvring Squat





6 LAPTOP / TABLET / PHONE Online Information Tides, Currents, Water Level Manuals / Guidelines / Regulations / Berth information (Pushed from office) Pilot planning system (Roster) Windforce / Waveheight / Swell
7 HIGH END PPU Navigator Marginal Ships (NMS) LOW END PPU Qastor Lite Deep draught / ULCV / Special objects Precision Navigation Mooring operations Path Prediction All ships Situational Awareness


8 Qastor Lite Situational Awareness 1 Real-time Hydro/Meteo sensors: -tide -current -wind -visibility Annotations containing additional Berth Information



9 Qastor Light Situational Awareness 2 Traffic - AIS targets Traffic - VTS feed Accurate & up-to Date Depth Information

10 NMS Navigator Marginal Ships Deep draught vessels Special objects ULCV Fully independent of any ships instruments Using GPS and GLONASS satellites on both L1 and L2 frequencies EGNOS or RTK corrections Providing stable and accurate HDG, RoT, SoG, CoG, side speed on bow and stern without significant delay HDG backed up with RoT sensor and with Kalman filtering Presentation on ruggedized laptop with high-density ENC s Additional info via UMTS data stream: VTS and Hydro-Meteo





11 NMS Precision Navigation 1 Cruise Vessel manoeuvring in swinging basin PTA-Amsterdam Special Object




12 NMS Precision Navigation 2 Passing Caland-bridge showing transverse distances by use of Lock Appoach mode




13 NMS Mooring Operations 1 Oil Jetties max impact speed < cm/s PPU in docking mode ore quay Container berths - cranes




14 NMS Mooring Operations 2 Bow speed Stern speed Rotterdam Yangtzechannel Euromax Berthing Manoeuver Cosco France - Southwest 6+ Bft







15 NMS Path Prediction 1 AIS Based ROT Independent PPU (NMS)




16 NMS Path Prediction 2 PIONEERING SPIRIT -8 GPS receivers, DP-class 3 -Certified ships ECDIS Unreliable Path Prediction High end PPU




17 NMS Path Prediction 3 Harbour entry - Amazonharbour Bow speed Lock approach Stern speed Lock entry



18 Saving Time & Money IN: Maren Maersk TEU, 399m, 15.2m Exchanging Berth at 2nd Maasvlakte APM Terminal -Europoort > 14.3 m = constrained by draught Maaschannel -Passing inside possible: max. wind +/- 8 m/s (4/5 Bft) OUT: MSC Oliver TEU, 395m, 15.6m







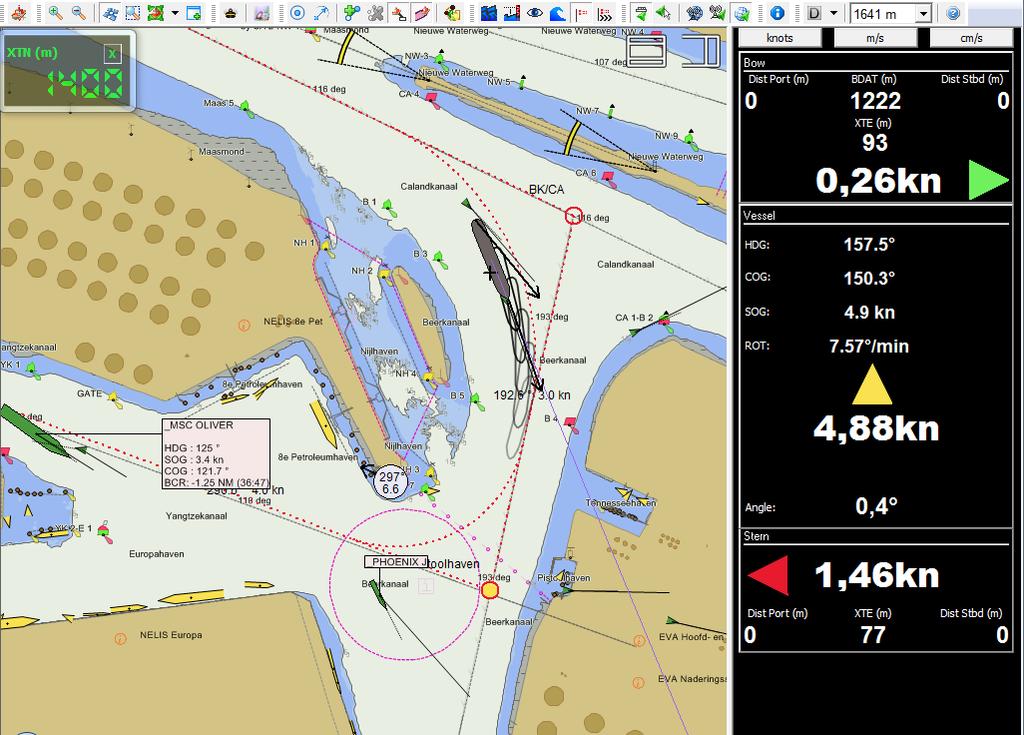












19 Saving Time & Money Unoccupied Berth at APM terminal Passing outside breakwaters: 5 6 hrs. In Out : m.v. Maren Maersk : m.v. MSC Oliver Passing inside harbour: hrs.
20 HIGH END PPU Navigator Marginal Ships (NMS) LOW END PPU Qastor Lite Deep draught / ULCV / Special objects Precision Navigation Mooring operations Path Prediction All ships Situational Awareness








21 ON THE MARKET: HARDWARE & SOFTWARE AD Navigation Navicom Dynamics Trelleborg Qastor SevenCs Trelleborg SEAiq Transas Pilot Pro
22 High Accuracy PPU s and how they can improve safety in navigation and piloting Enhances situational awareness Supports pilot decision making Increases safe berthing operations Enables optimisation of fairway use Evaluation & Training purposes



23 CURRENTS DEVELOPMENTS Implementation AIS Pilot Plug Connector ADQ-2 Independent ROT measurement Bluetooth and WLAN b/g Testing ADQ-3 Basic Path Prediction Future: ADX UNO ADX UNO Independent GNSS + heading + RoT+ AIS ½ times laptop form factor Uncorrected positioning: 2.0 m RMS RTK float positioning: 0.3m RMS RoT 0.5 deg/min Heading: 0.5 deg AIS range: 10 nm WLAN range: 200 m 12 hour battery life 950 g weight


24 FUTURE STATE PPU-PROJECT Request for Information Requirement Groups Scalable items Updating Administrator Non-ENC data Navigation Planning Alarms Recordings Non-functional Other Questions Requirements Scoring Matrix





25 FUTURE STATE PPU-PROJECT Goal High influence on future developments Suppliers
26 High Accuracy PPU s and how they can improve safety in navigation and piloting Introduction Laptop / tablet / phone Calculations & Voyage information Low end PPU Situational Awareness High end PPU Precision Navigation / Mooring Operations / Path Prediction Developments





27 Questions? High accuracy PPU s and how they can improve safety in navigation and piloting Thank you for your attention