Opportunity Assessment and Advanced Control
|
|
|
- Gilbert Cain
- 5 years ago
- Views:
Transcription
1 Opportunity Assessment and Advanced Control GREGORY K MCMILLAN use pure black and white option for printing copies 11/10/2008 1

2 Presenter Greg is a retired Senior Fellow from Solutia Inc. During his 33 year career with Monsanto Company and its spin off Solutia Inc, he specialized in modeling and control. Greg received the ISA Kermit Fischer Environmental Award for ph control in 1991, the Control Magazine Engineer of the Year Award for the Process Industry in 1994, was inducted into the Control Process Automation Hall of Fame in 2001, and honored by InTech Magazine in 2003 as one of the most influential innovators in automation. Greg has written a book a year for the last 20 years whether he needed to or not. About half are humorous (the ones with cartoons and top ten lists). Presently Greg contracts via CDI Process and Industrial as a principal consultant in DeltaV Applied R&D at Emerson Process Management in Austin Texas. For more info visit: (free E-books) 11/10/2008 2

3 See Chapter 2 for more info on setting the foundation 11/10/2008 3

4 See Chapters 2-4 for more info on the application of model predictive control 11/10/2008 4


5 See Appendix C for background of the unification of tuning methods and loop performance 11/10/2008 5

6 See Chapter 1 for the essential aspects of system design for ph applications 11/10/2008 6
7 Overview This presentation offers examples and a methodology for the identification of the benefits and solutions for advanced control Pyramid of Technologies Benchmarking Opportunity Assessment Methodology Opportunity Assessment Questions Mythology Model Predictive Control Primer Example of Transition from Conventional to Advanced Control MPC Valve Rangeability and Sensitivity Solution MPC Maximization of Low Cost Feed Example MPC Procedure and Rules of Thumb Virtual Plant Lessons Learned What we Need Columns and Articles in Control Magazine 11/10/2008 7
8 Pyramid of Technologies APC is in any technology that integrates process knowledge The greatest success has been Achieved when the technology closed the loop (automatically corrected the process without operator intervention) TS RTO LP/QP Ramper or Pusher Model Predictive Control Property Estimators Foundation must be large and solid enough to support upper levels. Effort and performance of upper technologies is highly dependent on the integrity and scope of the foundation (type and sensitivity of measurements and valves and tuning of loops) Fuzzy Logic Abnormal Situation Management System Process Performance Monitoring System Loop Performance Monitoring System Auto Tuning (On-Demand and On-line Adaptive Loop Tuning) Basic Process Control System TS is tactical scheduler, RTO is real time optimizer, LP is linear program, QP is quadratic program 11/10/2008 8
9 Loops Behaving Badly 1 E i = T i E o K o K c A poorly tuned loop will behave as badly as a loop with lousy dynamics (e.g. excessive dead time)! You may not want to minimize the integrated error if the controller output upsets other loops. For surge tank and column distillate receiver level loops you want to minimize and maximize the transfer of variability from level to the manipulated flow, respectively. where: E i = integrated error (% seconds) E o = open loop error from a load disturbance (%) K c = controller gain K o = open loop gain (also known as process gain) (%/%) T i = controller reset time (seconds) (open loop means controller is in manual) Tune the loops before, during, and after any process control improvements 11/10/2008 9
10 Unification of Controller Tuning Settings All of the major tuning methods (e.g. Ziegler-Nichols ultimate oscillation and reaction curve, Simplified Internal Model Control, and Lambda) reduce to the following form for the maximum useable controller gain K c = 0.5* K o τ1 θ max Where: K c = controller gain K o = open loop gain (also known as process gain) (%/%) τ 1 = self-regulating process time constant (sec) θ max = maximum total loop dead time (sec) 11/10/
11 Categories of Control Used In Benchmarking 1. Basic - Regulatory and Discrete Control (PID, pump, and on-off valve control) 2. Basic - Unit Operation Control (batch control and automated startup 3. Basic - Advanced Regulatory Control (override control) 4. Advanced - Production Management Control (flexible manufacturing) 5. Advanced - Advanced Multivariable Control (model predictive control 6. Advanced - Global On-Line Optimization (real time optimization) 7. Data - Advanced Advisory Systems (multivariate statistical process control) 8. Data - Process Data Access (presentation to operations, maintenance,...) 9. Data - Manufacturing Data Integration (integration of business systems) Advanced process control (APC) is any control system higher than basic loop and batch control that offers additional benefits (categories 3-9) incorporates process knowledge uses direct or implied economic objective(s) Ten companies who are leaders in process control were benchmarked 11/10/
12 Benefits from Process Control Improvement by Top Three Companies Benchmarked Benefits % COGS basic advanced data Categories of Controls Closer to balanced approach This approach appears to give the greatest benefits Few companies have been able to accomplish this For these companies, the total of all categories is 8% of COGS 11/10/
13 Advanced Process Control Benefits Improved yield (better selectivity)* Less blending, scrap, and rework or higher price for higher grade * Lower utility costs (energy minimization) Higher production rate (feed maximization) Increased on stream time (fewer shutdowns) Reduced maintenance (less stress on equipment) Safer Operation (fewer shutdowns and less stress on equipment) * The benefits for improved yield and less scrap or rework can be taken as an increase in capacity or a reduction in raw materials 11/10/
14 Opportunity Sizing and Assessment (2% of COGs on the average in 50 processes) Do a thorough opportunity sizing (OS) before the opportunity assessment using cost sheets, product prices, historian trends, business plans, research reports, technical studies, and simulations to establish actual, practical, and theoretical performance (e.g. yield, capacity) with operations and technology Use plant process engineers to go through process, identify constraints, and offer ideas on opportunities to reduce gaps identified in OS to see and work way out of the current process box Avoid temptation of canned solution or for consultants to come to conclusions before the plant people thoroughly discuss peculiarities and special problems. Get knowledgeable people to speak first and ask questions hold off on solutions but offer concepts that people can use to generate solutions and be a good listener Use historian to find loops in manual, limit cycles, slow or oscillatory set point and load responses, and controller outputs running near limits 11/10/
15 Opportunity Sizing and Assessment (2% of COGs on the average in 50 processes) Look for opportunities to infer compositions from fast lower maintenance measurements such as density, viscosity, mass spectrometers, microwave, and nuclear magnetic resonance Seek applications of accurate mass flow ratios for material balance knowledge and control Ask what would happen if a set point or operating mode is changed Pick control technologies to address opportunities and give relative estimate of implementation cost and time (e.g. high, medium, low) and per cent of gap addressed Ask plant process engineers to estimate percentage of gap addressed by each solution Take advantage of momentum and group enthusiasm start on quick hits immediately and set definitive schedule and assignments for others (avoid inertia of waiting for quote or study) All the people you need to get started should be in the meeting, otherwise you have the wrong people Tune the loops and improve the loops 11/10/
16 Opportunity Assessment Questions Are there limits to operating values that are important for product quality, efficiency, or for environmental, personnel, and property protection? Can these limits be measured online, analyzed in the lab, or calculated? Has there been down time attributed to violations of these limits? This can show up as an increase in the maintenance cost or number of failures of equipment, a decrease in the run time between catalyst replacement or regeneration, a decrease in the run time between clean outs or defrosts from a faster rate of fouling or coating, and trips from interlocks for personnel and property protection. Has product been downgraded, recycled, returned, or pitched as the result of excursions beyond these limits? Would operation closer to a limit significantly decrease utility or raw material use or increase production rate? Have there been any environmental violations or near misses? Does the operator pick set points to keep operating points away from limits? Is there a batch operation with a feed rate that depends upon a process variable where the batch time could be reduced by increase in a feed rate by operating closer to process or equipment limits? 11/10/
17 Opportunity Assessment Questions Are there more than two controlled or constraint variables affected by more than one manipulated variable? Are these controlled or constraint variables important? Do the controlled variables have the same order of magnitude lag and delay? Can the PID controllers effectively use rate action? Is the time delay more than ¼ of the total time to steady state or time to reach 98% of the change (T 98 )? Is a chromatograph used for a controlled or constraint variable? Can you measure or calculate the upsets? Do these upsets affect more than one controlled or constraint variable? Are equations or parameters not known completely enough to calculate the feed forward gain and timing requirements? Are there any loops where the initial response is opposite of the final response? 11/10/
18 Mythology There were a lot of myths heard in opportunity assessment Here is the short list of the more humorous ones Auto tuners can compute controller tuning settings with an accuracy of more than one digit. Act surprised when unmeasured disturbances, load changes, valve stick-slip, and noise cause each result to be different. Look forward to the opportunity to play bingo with the second digit. You can just dump all your historical data into an artificial neural network and get wonderful results. Forget about the same stuff that cause auto tuners to have problems. Use variables drawing straight lines because anything that smooth or well controlled must be important. Use the controlled variables (process variables) instead of the manipulated variables (controller outputs). Don t try to avoid extraneous inputs or identification of the control algorithm instead of the process. If you want to purse a career in data processing, use every input you can find. 11/10/
19 Mythology Models can predict a process variable that is not measured in the field or lab. Great way to spur creativity in training an ANN, developing a PLS model, and validating a first principal model plus it has the added bonus of the model never being wrong. Wait till your customers figure out something is wrong with the composition of your product. Discount as hearsay any suggestions that even the best models need periodic correction Models don t need to include process and measurement time delays After all the following time honored traditions can t all be misleading Professors teach students to think steady state Books on process control focus on continuous processes Statisticians analyze snapshots of data Operations want instantaneous results Engineers think the temperatures, compositions and flows in the plant are constant and match what are defined on the Process Flow Diagram (PFD) 11/10/
20 Mythology Process control does not apply to batch processes. Use that time tested fixed sequence. After all, that batch cycle time is a tradition and the golden batch sure looks shiny. Positioners should not be used on fast loops. What was true for the good old days of pneumatic positioners and analog controllers must still be true today. Surely, digital positioners with tuning settings and digital control system scan times can t make the original theoretical concerns less important than the practical issues of real valves. If you would rather believe the controller outputs are the actual valve positions, and just want valve problems to slip by, save some bucks on your project and only put positioners on slow loops. Just don t stick around for start up. 11/10/
21 Mythology You need to upset the process to create a model The effect of a properly designed PRBS test averages out Relay tuning methods may provide tighter control than loop Software can automatically identify models from the normal set point changes made during startup and operation To reduce variability in process outputs (temperatures and compositions), keep all the process inputs (flows) constant. Keep believing that you can fix both the process inputs and outputs and don t accept the notion that process control must transfer variability from process outputs to process inputs to compensate for disturbances. Just make the variability disappear. Use process outputs for principal component analysis, neural network and partial least squares models regardless of control system design Use the same process outputs (e.g. composition, temperature) after the loop is closed and variability has been transferred to process inputs (e.g. flows) 11/10/
22 When Process Knowledge is Missing in Action PV distribution for original control LOCAL Set Point Upper Limit 2-Sigma 2-Sigma RCAS Set Point value PV distribution for improved control Extra margin when war stories or mythology rules Good engineers can draw straight lines Great engineers can move straight lines 2-Sigma 2-Sigma Benefits are not realized until the set point is moved! (may get benefits by better set point based on process knowledge even if variability has not been reduced) 11/10/
23 Common Misconceptions You need an advanced degree to do advanced control. Not so anymore. New software packages used to form a virtual plant automate much of the expertise needed and eliminate the need for special interfaces. The user can now focus mostly on the application and the goal. Models only apply to continuous processes. Since most of the applications are in the continuous industry, this is a common misconception. While it is true that steady state simulations are not valid for batch operations since there is by definition no steady state, dynamic simulations can follow a batch as long as the software can handle zero flows and empty vessels. Model based control (MPC), which looks at trajectories is suitable for optimization of fed batch processes. The opportunities to improve a process s efficiency by the use of models add up to be about 25% for batch compared to 5% for continuous operations 11/10/
24 Common Misconceptions You need consultants to maintain experimental models. No longer true. The ease of use of new software allows the user to get much more involved, which is critical to make sure the plant gets the most value out of the models. Previously, the benefits started to drop as soon as the consultant left the job site. Now the user should be able to adjust, troubleshoot, and update the models. You don t need good operator displays and training for well designed advanced control systems. The operators are the biggest constraint in most plants. Even if the models used for real time optimization (RTO) and model based control (MPC) are perfect, operators will take these systems offline if they don t understand them. The new guy in town is always suspect, so the first time there is an operational problem and there is no one around to answer questions, the RTO and MPC systems are turned off even if they are doing the right thing. Training sessions and displays should provide an understanding of the effect of future trajectories on actions taken by controller 11/10/
25 Common Misconceptions Simple step (bump) tests are never enough. You must do a PRBS test. A complete pseudo random binary sequence (PRBS) test may take too long. The plant may have moved to an entirely different state, tripped, or in the case of a batch operation finished, before a PRBS test is complete. As a minimum, there should be one step in each direction held to steady state. The old rule is true, if you can see the model from a trend, it is there. Sometimes, the brain can estimate the process gain, time delay, and lag better than a software package. You need to know your process before you start a MPC application. This would be nice, but often the benefits from a model stems from the knowledge discovery during the systematic building and identification procedures. Frequently, the understanding gained from developing models leads to immediate benefits in terms of better set points and instruments. The commissioning of the MPC is the icing on the cake and locks in benefits Optimization by pushing constraints will decrease on-stream time. Not true. MPC sees future violations of constraints to increase on-stream time 11/10/
26 Batch Control Variability Transfer from Feeds to ph, and Reactant and Product Concentrations Feeds Concentrations Optimum Product Reactant Product Reagent Optimum ph ph Reactant Optimum Reactant Most published cases of multivariate statistical process control (MSPC) use the process outputs and this case of variations in process variables induced by sequenced flows. 11/10/
27 PID Control Variability Transfer from ph and Reactant Concentration to Feeds Feeds Concentrations Optimum Product Reactant Product Reactant Reagent ph Optimum ph Optimum Reactant The story is now in the controller outputs (manipulated flows) yet MSPC still focuses on the process variables for analysis 11/10/
28 Model Predictive Control Variability Transfer from Product Concentration to ph, reactant Concentration, and Feeds Feeds Reactant Concentrations Optimum Product Product ph Optimum ph Reagent Reactant Optimum Reactant Time Model Predictive Control of product concentration batch profile uses slope for CV which makes the integrating response self-regulating and enables negative besides positive corrections in CV Time 11/10/
29 Top Ten Signs of an Advanced Control Addiction (10) You try to use Neural Networks to predict the behavior of your children. (9) You attempt to use Fuzzy Logic to explain your last performance review. (8) You use so much Feedforward, you eat before you are hungry. (7) You propose Model Predictive Control for the Miss USA contest. (6) You develop performance monitoring indices for your spouse. (5) You implement adaptive control on your stock portfolio. (4) You carry wallet photos of Auto Tuner trend results. (3) You apply dead time compensation by drinking before you go to a party. (2) You recommend a survivor show where consultants are placed in a stressed out old pneumatic plant with no staff or budget and are asked to add advanced control to increase plant efficiency. (1) Your spouse has to lure you to bed by offering expert options for advanced control
30 Types of Process Responses CV Self-Regulating Process Gain K p = CV / CO Integrating Process Gain K i = CV / t / CO curve 0 = Self-Regulating curve 1 = Integrating curve 2 = Runaway CO (% step in Controller Output) Ramp 0 1 CV Acceleration 2 0 τ d τ o Time (minutes) Total Loop Dead Time Open Loop Time Constant The temperature and composition of batch processes tend to have an integrating response since there is no self-regulation from a discharge flow 11/10/
31 What Does PID and MPC See of Future? (Long Term versus Short Term View) response PID loop only sees this loop dead time compensator sees one dead time ahead MPC sees whole future trajectory controlled variable (CV) set point manipulated variable (MV) time present time PID is best if high gain or rate action is needed for immediate action to correct frequent fast unmeasured disturbances or a prevent runaway 11/10/
32 Linear Superposition of MPC CV 1 = f( MV 1 ) set point time CV 1 = f( MV 2 ) set point time CV 1 = f( MV 1 + MV 2 ) set point Nomenclature: CV is controlled variable (PV) and MV is manipulated variable (IVP) time 11/10/
33 Feedback Correction of Process Vector and Mirror Image Control Vector process vector predicted CV actual CV set point time shift vector to correct model error process vector set point compute future moves for a mirror image vector to bring process to set point trajectory time time process vector set point control vector Most MPC packages use standard matrix math and methods (e.g. matrix summation and inversion) 11/10/
34 Situations Where Model Predictive Control May be Beneficial Process and Measurement Noise Erratic or Stepped Measurement Response Inverse Response Large Dead Times Move Size Limits and Penalty on Move (Move Suppression)* Measured Disturbances Multiple Manipulated Variables Interactions Constraints Optimization No PID Control Expertise * Enables regulation of the transfer of variability from CV to MV 11/10/
")
35 Automated PRBS Test for Fed-Batch Reactor Test Data During Fed-Batch Operation Non-stationary Behavior (operating point is not constant) 11/10/
36 Linear Program (LP) Optimizer MV2 CV2max CV1min MV2max MV1min Region of feasible solutions Optimal solution is in one of the vertexes CV1max MV1max CV2min MV2min MV1 For a minimization of maximization of a MV as a CV, a simple ramper or pusher is sufficient. If the constraint intersections move or the value of type of optimal CV changes, real time Optimization is needed to provide a more optimal solution. 11/10/
37 How Well Can Coincident Constraints Be Handled? Number of % Time % Time - % Time Coincident Operator Override MPC Constraints Can Hold Can Hold Can Hold One 30% 90% 98% Two 20% 45% 90% Three 0% 30% 80% MPC can hold constraints twice as tight as override and ten times as tight as operator if measurements and final elements precision is not an issue 11/10/
38 Example of Basic PID Control CTW TC-3 vent PC-1 FC-1 condenser RC-1 feed A FT CAS FC-2 TT PT ratio control feed B FT TT TC-1 cascade control CAS coolant makeup TC-2 Conventional Control reactor TT product 11/10/
39 Example of Advanced Regulatory Control override control maximum production rate < CAS ZC-3 ZC-2 CTW TC-3 ZC-4 PC-1 vent < CAS FC-1 condenser RC-1 feed A FT CAS FC-2 TT PT ratio feed B FT TT TC-1 CAS ZC-1 CAS coolant makeup TC-2 Override Control TT ZC-1, ZC-3, and ZC-4 work to keep their respective reactor control valves at a max throttle position with good product sensitivity and room for loop to maneuver. ZC-2 will raise TC-1 SP if FC-1 feed rate is maxed out 11/10/
40 Example of Model Predictive Control set point CTW MPC vent Maximize feed rate MPC RCAS FC-1 condenser PC-1 RC-1 feed A CAS FT FC-2 TT PT ratio feed B FT TT MPC set point coolant makeup RCAS TC-2 Model Predictive Control (MPC) reactor TT product 11/10/
41 Example of MPC (Responses) manipulated variables (MVs) maximize controlled variables (CVs) MPC TC-1 reactor temperature PV TC-3 condenser temperature PV FC-1 reactor feed A SP TC-2 jacket exit temperature SP null TV-1 condenser coolant valve IVP null FC-1 reactor feed A SP constraint variables (AVs) FV-1 feed A valve IVP TV-2 reactor coolant valve IVP TV-3 condenser coolant valve IVP PV-1 vacuum system valve IVP 11/10/
42 Top Ten Signs You Have a Dysfunctional MPC Team The recommended sizes of controllers range from 0x0 to 100x100 The models for the first controller fill up the hard drive The model after 4 months of PRBS testing looks suspiciously like the model from the first bump test The completion of the project is tied to the Second Coming Food fights break out in the cafeteria over matrix design Meetings kick off with kick boxing between consultants More than one consultant onsite at a time is ruled a health hazard A psychiatrist is chosen as the best possible project manager The project over runs it s Prozac budget The creators of South Park request movie rights to the project
43 MPC Valve Sensitivity and Rangeability Solution MPC Small (Fine) Reagent Valve SP manipulated variables Large (Coarse) Reagent Valve SP controlled variable Small (Fine) Reagent Valve SP null controlled variable Neutralizer ph PV Model Predictive Controller (MPC) setup for rapid simultaneous throttling of a fine and coarse control valves that addresses both the rangeability and resolution issues. This MPC can possibly reduce the number of stages of neutralization needed 11/10/
44 MPC Valve Sensitivity and Rangeability Solution 11/10/

45 MPC Valve Sensitivity and Rangeability Solution 11/10/
46 MPC Valve Sensitivity and Rangeability Solution Successive Load Upsets Process Set Point Change Trim Valve Set Point Change Trim Valve Critical Process Variable Coarse Valve 11/10/
47 MPC Maximization of Low Cost Feed Example manipulated variables MPC High Cost Fast Feed SP Low Cost Slow Feed SP controlled variable Critical PV (normal PE) Maximize optimization variable Low Cost Slow Feed SP (lowered PE) null 11/10/
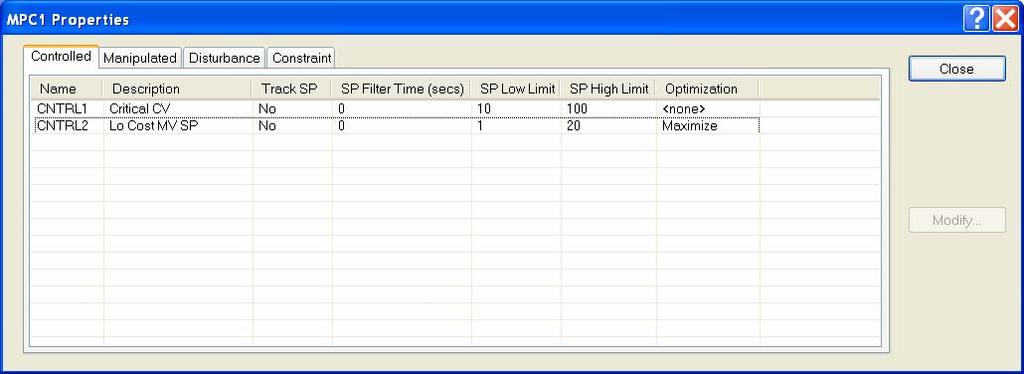
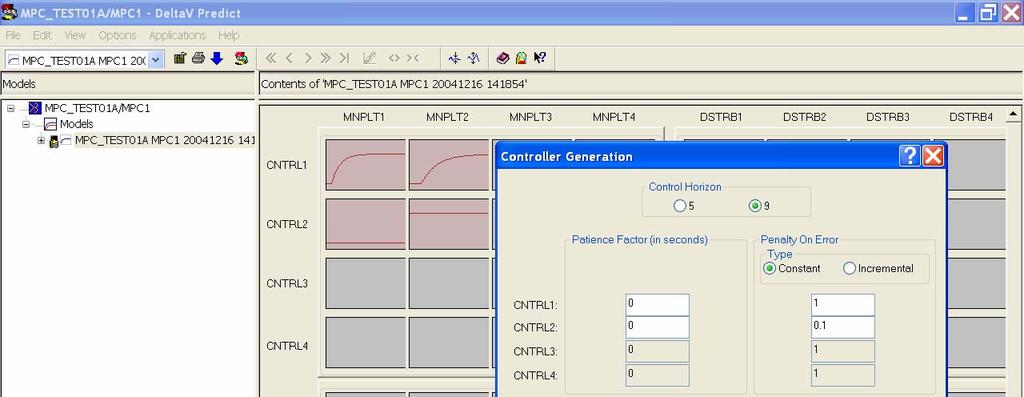
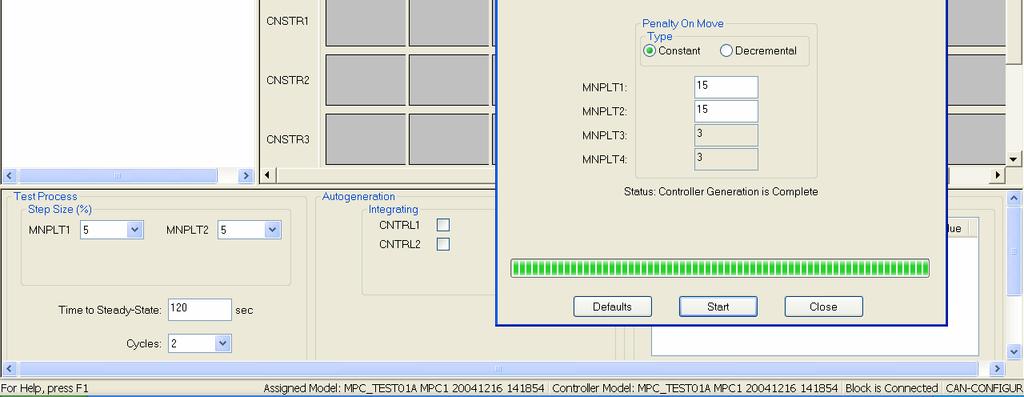
48 MPC Maximization of Low Cost Feed Example 11/10/

49 MPC Maximization of Low Cost Feed Example Riding Max SP on Lo Cost MV Riding Min SP on Hi Cost MV Load Upsets Critical CV Load Upsets Critical CV Set Point Changes Low Cost MV Maximum SP Increased Set Point Changes Low Cost MV Maximum SP Decreased Lo Cost Slow MV Hi Cost Fast MV 11/10/
50 MPC Procedure and Rules of Thumb Define control/economic scope and objectives Tune and improve the loops Install flow loops or secondary loops to avoid direct manipulation of a valve Reduce the data compression and increase the update rate of the data historian Define and document baseline of operating conditions Define and implement performance indices For self-regulating responses, steady state = dead time plus 4 time constants For integrating processes, time horizon is at least 5 dead times Calculate the integrating process gain for level from vessel geometry and flows Choose a step size that is at least 5x the noise level or resolution limit Conduct a simple bump test for each manipulated and disturbance variable Revise estimates of time to steady state or time horizon and step size Conduct a Pseudo Random Binary Sequence (PRBS) test if needed Choose simplest model (fluctuations of 10% in fit or parameters are insignificant) Simulate the response for changes in targets, economics, and disturbance variables Increase the penalty on move (move suppression) to reduce oscillation Decrease the penalty on error and/or priority for less important controlled variables Provide displays that show future predictions and process metrics Train operations and engineering on use and benefits 11/10/


51 Virtual Plant Setup Virtual Plant Laptop or Desktop or Control System Station Advanced Control Modules This is where I hang out Process Models (first principal and experimental) 11/10/
52 Virtual Plant Integration DCS batch and loop configuration, displays, and historian Embedded Modeling Tools Embedded Advanced Control Tools Dynamic Process Model Online Data Analytics Virtual Plant Laptop or Desktop Personal Computer Or DCS Application Station or Controller Loop Monitoring And Tuning Model Predictive Control Process Knowledge 11/10/
53 Adaptation and Optimization Model Predictive Control and LP For Optimization of Actual Plant Optimization Temperature Set Point Reactant Ratio Correction Actual Plant Multi-way Principal Component Analysis Actual Batch Profiles Inferential Measurements: Reaction Rates Online KPI: Yield and Capacity Key Actual Process Variables Super Model Based Principal Component Analysis Optimum and Reference Batch Profiles Virtual Plant Key Virtual Process Variables Model Parameters Error between virtual and actual process variables are minimized by correction of model parameters Adaptation Model Predictive Control and Neural Network For Adaptation of Virtual Plant 11/10/
54 Top Ten Reasons I Use a Virtual Plant (10) You can t freeze, restore, and replay an actual plant run (9) No software to learn, install, interface, and support (8) No waiting on lab analysis (7) No raw materials (6) No environmental waste (5) Virtual instead of actual problems (4) Runs are done in minutes instead of days (3) Plant can be operated on a tropical beach (2) Last time I checked my wallet I didn t have $1,000K (1) Actual plant doesn t fit in my suitcase
55 Typical Uses and Fidelities of Process Models (Fidelity Scale 0-10) Process Development Media or reactant optimization and identification of kinetics on the bench top - 10 Optimization of process conditions in pilot plant - 9 Agitation and mass transfer rates - 8* Process scale-up 8 * - assumes computational fluid dynamics (CFD) program provides necessary inputs Process Design Innovative reactor designs or single use bioreactors (SUB) - 7 Vessel, feed, and jacket system size and performance - 6 Automation Design Real Time Optimization (RTO) - 7 Model Predictive Control (MPC) - 6 Controller tuning (PID) - 5 Control strategy development and prototyping - 4 Batch sequence (e.g. timing of feed schedules and set point shifts) 3 11/10/
56 Typical Uses and Fidelities of Process Models (Fidelity Scale 0-10) Online Diagnostics Root cause analysis - 5 Data analytics development and prototyping - 4 Operator Training Systems Developing and maintaining troubleshooting skills - 4 Understanding process relationships - 3 Gaining familiarity with interface and functionality of automation system - 2 Configuration Checkout Verifying configuration meets functional specification - 2 Verifying configuration has no incorrect or missing I/O, loops, or devices /10/
57 What Do We Need? Loops that are not islands of automation Unit operation control for integrated objectives, performance, and diagnostics High speed local control of pressure with ROUT, CAS, and RCAS signals Engineer with process, configuration, control, measurement, and valve skills Virtual plants with increasing Fidelity (3 -> 7 chemical, 3->10 biological) Product development, process design, real time optimization, advanced control prototyping and justification, process control improvement, diagnostics, training Smart wireless integrated process and operations graphics Online process, loop, and advanced control metrics for plants, trains, and shifts Yield, on-stream time, production rate, utility cost, raw material cost, maintenance cost* Variability, average % of max speed (Lambda), % time process variable or output is at limits, % time in highest mode, % deadband, % resolution, number of oscillations Process control improvement (PCI) benefits ($ of revenue and costs) 3-D, XY, future trajectories of process and performance metrics response, data analytics, worm plots, and trends of automatically selected correlated variables Coriolis flow meters, RTDs, and online and at-line analyzers everywhere Real time analysis via probes or automated low maintenance sample systems Automated time stamped entry of lab results into data historian Online material, energy, and component balances Control valves with < 0.25% resolution and < 0.5% dead band 11/10/
58 Lessons Learned Let process people see and work their way out the process box otherwise you will get the conclusion there is nothing better to do Makes sure business, maintenance, E&I, configuration, operations, process, analyzer specialists, and research people are in the opportunity assessment Ask can we trial a change in set point or operating mode If best, do it first in a model, on a bench-top, or in a pilot plant If the process is not modeled, meetings can go around in circles Get involved in configuration and implementation Camp out with the operators during tests, trials, and commissioning Stay in touch with everyone in the opportunity assessment Report benefits and distribute credit Models can help distinguish benefits from noise or other effects Remember MMM and PPP Measurements (especially density and mass flow), models, and momentum (MMM) Process knowledge, performance indicators, and people psychology (PPP) 11/10/
59 Key Points Conduct an open minded opportunity sizing and assessment Tune the loops and improve the loops Add model predictive control Model the process to dispel myths and build on process knowledge Improve the set points Add composition control (add inferential measurements and analyzers) Transfer variability from most important process outputs Add online data analytics (add online multivariate statistical process control) Add online metrics to spur competition, and to adjust, verify, and justify controls Maintain the momentum 11/10/
60 Control Magazine Columns and Articles Control Talk column Has Your Control Valve Responded Lately? 2003 Advanced Control Smorgasbord 2004 Fed-Batch Reactor Temperature Control 2005 A Fine Time to Break Away from Old Valve Problems 2005 Virtual Plant Reality 2005 Full Throttle Batch and Startup Responses 2006 Virtual Control of Real ph 2007 Unlocking the Secret Profiles of Batch Reactors /10/