Optimizing a Containership Stowage Plan. using a modified Differential Evolution algorithm
|
|
|
- Charity Booker
- 5 years ago
- Views:
Transcription
1 Optimizing a Containership Stowage Plan using a modified Differential Evolution algorithm Speaker: Dr. Yun Dong ydong@tli.neu.edu.cn Supervisor: Pro. Lixin Tang Lixintang@mail.neu.edu.com The Logistics Institute, Northeastern University, Shenyang, China
2 Outline Introduction Literature Review Containership Stowage Planning (CSP) Problem Mathematical Model of CSP Problem Modified differential evolution (DE) algorithm Experimental Example Conclusion

3 Introduction Containers came into the international conveyance of sea freight almost five decades ago. Today over 90% of the world s deep-sea general cargo is transported in containers.
4 Introduction Between 1990 and 2008, container traffic has grown from 28.7 million TEU to million TEU, container throughput went from 88 million to 530 million TEU. And in 2009, almost one quarter of the world's dry cargo was shipped by container. Containerization not only changed the face of shipping but also revolutionized the world trade.
5 Introduction External Tractor - XT Internal Tractor - IT Outbound Grounding Yard Crane Inbound Discharging HIT Inbound Pickup Outbound Loading Quay Crane Gate Complex Container Yard Berth A classical container terminal can be roughly divided into two main areas: the quayside and the storage yard. The whole process of operating containers is dynamic with the continued arrival of vessels and land vehicles.
 is to draw up a plan of")



6 Introduction As an important link to containers transportation, the containership stowage planning (CSP) is to draw up a plan of determining how to stow a set C of containers with different types into a set S of available locations of a containership with the considerations of some structural and operational constrains related to both the containers and the ships. In practice, CSP not only affects the economic benefit of shipping line and container terminal but also has direct relation to the safety of the ships and cargos.
7 Introduction Factors must be considered: ->the structure of ship ->distribution of goods ->port of destination (POD) Different objectives: ->optimal space allocation ->maximization of the stability ->minimization the berthing time
8 Literature Review Todd and Sen (1997) firstly attempted to apply genetic algorithm with complete encoding to solve CSP problem. In their approach, different sections of the solution vector corresponded to each POD. Wilson and Roach (1999) and Wilson et al. (2001) tested the application of local search algorithms. In particular, the authors broke the container stowage process into two phases. Dubrovsky and Levitin (2002) proposed a compact encoding technique, in which the space of solution was significantly reduced, consequently, the performance of algorithm was advanced. Ambrosino et al. (2006) and Ambrosino et al. (2009) split the set of available locations into different parts with respect to their bay address, and solved their model for the global stability of ship by performing multi-exchanges and using a tabu search (TS) meta-heuristic approach.
9 CSP Problem However, due to many simplifying assumptions, such as neglecting the irregular structure of the hold and the High Cube container commonly used at many terminals and so on, the most of approaches employed in literatures are not suitable for real large scale applications. In this paper, we solve the CSP problem as a combinatorial optimal problem with maximizing stability of ships and keeping zero reshuffles using a modified (differential evolution) DE algorithm (employed a new mutation operator), to our knowledge, with the first application of DE to stowage planning.
10 CSP Problem Bay Row Tier Deck 'Bays 40'Bays 'GP:20' 8' 8'6" 40'GP:40' 8' 8'6" 40'HC:40' 8' 9'6" To give an explanation of CSP, firstly, we consider the basic structure of a ship with its perspective view shown in figure above.
11 CSP Problem Bay Row Tier Deck 'Bays 40'Bays 'GP:20' 8' 8'6" 40'GP:40' 8' 8'6" 40'HC:40' 8' 9'6" Each position is addressed by the following identifiers: (a) Bay, the position relative to the cross section of the ship, counted from the bow to stern; (b) Row, the position relative to the vertical section of the corresponding bay, counted from the centre to the both sides; (c) Tier, the position relative to the horizontal section of the corresponding bay, counted from the bottom to the top of the ship. Thus a container is located in a given bay, on a given row and on a given tier.
12 CSP Problem Bay Row Tier Deck 'Bays 40'Bays 'GP:20' 8' 8'6" 40'GP:40' 8' 8'6" 40'HC:40' 8' 9'6" In particular, each 20 bay is coded with an odd number for the stowage of 20 containers, i.e. by 01, 03, 05, etc., while two continuous odd bays conventionally yield one even bay for stowing the 40 containers, i.e. bay 10 = bay 09 + bay 11.

 have been introduced recently including units at 9 6 and 10 6 high.")
13 CSP Problem Bay Row Tier Deck 'Bays 40'Bays 'GP:20' 8' 8'6" 40'GP:40' 8' 8'6" 40'HC:40' 8' 9'6" There are three standard sizes of containers are considered in this paper, namely 20 GP (General Purpose), 40 GP and 40 HC (High Cube). GP indicates a container should be 8 width, 8 6 high and, most commonly, 20 or 40 long. Taller units (HC) have been introduced recently including units at 9 6 and 10 6 high. As it is always required for security, 20 containers cannot be located above locations where 40 containers are already stowed.
14 CSP Problem A good general stowage rule suggests to load first (i.e. in the lower tiers) those containers having as destination the final stop of the ship and load last those containers that have to be unloaded first. Containers are loaded by cranes from the bottom of the ship into vertical stacks. If a container destined for one port is positioned below containers destined for a later port, the containers above must be unloaded and reloaded at earlier port, such movements are called reshuffles. Movements of container reshuffle incur additional costs in time and reducing the productivity of ship operation, so containers should be arranged optimally to minimize the time spent in port.
15 CSP Problem Furthermore, a balanced distribution of the weight in the ship is necessary for good stowage. Moreover, to ensure the security, after the loading operation is complete, we have to verify two equilibrium indicators considered as the objectives of mathematical model in our work. Horizontal equilibrium The weight on the stern of the ship must be equal (or with a difference within a certain tolerance) to the weight on the bow. Cross equilibrium The weight on the right side of the ship, including the odd rows of the hold and upper deck should be equal (or with a difference within a certain tolerance) to the weight on the left side of the ship, including the even rows of the hold and upper deck.
16 Mathematical Model Expression (1) is the objective function Z that minimizes the total ship stability difference W, expressed in terms of the sum of W 1 and W 2 denoting the cross equilibrium difference and horizontal equilibrium difference respectively. Expression (2) and (3) are the definition expression of W 1 and W 2 respectively.
17 Mathematical Model Assignment constraints size constraints Weight constraint POD constraints High Cube constraints Decision variable
18 The classic differential evolution (DE) algorithm Differential Evolution (DE), proposed by Storn and Price (1997), is an efficient and powerful population-based stochastic search technique for solving optimization problems, which has been widely applied in many scientific and engineering fields.
19 The modified DE To solve the CSP problem efficiently for application in practice, we present a modified DE employing a new evolutionary strategy, which can improve the balance performance of the algorithm between exploitation and exploration during the process of convergence. A. Initialization. To initialize a population of NP D-dimensional individuals over the optimization search space, we shall symbolize each individual by x i g = [x i g,1, x i g,2,, x i g,d] encoded as the loading sequence of all containers, for i = 1,, NP and D = C, where g is the current generation. We can initialize the jth dimension element of the ith individual according to a formula as below i x0, = L + rand (0,1) ( U L ) j j j j j where randj(0,1) is a uniformly distributed random number confined in the [0, 1] range; U and L are lower and upper bound values of individual respective.
20 The modified DE B. Mutation Operation. For each target individual x i g of the current population a new individual, called the mutant individual, is derived through the linear combination of base individual x i g and difference individuals randomly selected individuals with a real parameter mutation factor F determined by a normal distribution with mean value 0.5 and standard deviation 0.1. The originally proposed and most frequently used mutation strategy in the literature are listed below: v = x + F ( x x ) i r1 r2 r3 g g g g For enhancing the robustness of the algorithm, a new difference vector, added in mutation strategy, combines a better individual and a random individual beyond the current population within the searching space to improve the convergence rate and the diversity of the population respectively. The new mutation strategy is shown as below: v = x + F ( x x ) + F ( x x ) i r1 r2 r3 b r g g g g g g
21 Experimental Example We present some Evaluation examples aimed at evaluating the performance of our approach. In particular, our test problems are related to a 600 TEUs containership with 16 bays, 8 max available rows in the upper deck, 6 in the hold, 4 max available tiers in the upper deck and 4 in the hold. Here we test our approach looking for stowage plan of 10 real instances; such instances differ each other for the number of containers to be loaded, ranging from 273 to 406, the number of ports to be visited, that is 3, and the number of TEUs to load on board, ranging from 451 to 570.
22 Experimental Example We present some Evaluation examples aimed at evaluating the performance of our approach. In particular, our test problems are related to a 600 TEUs containership with 16 bays, 8 max available rows in the upper deck, 6 in the hold, 4 max available tiers in the upper deck and 4 in the hold.
23 Experimental Example Here we test our approach looking for stowage plan of 10 real instances; such instances differ each other for the number of containers to be loaded, ranging from 273 to 406, the number of ports to be visited, that is 3, and the number of TEUs to load on board, ranging from 451 to 570.
24 Experimental Example Table 2 reports the comparison between the solutions obtained by solving the multi-objective model for CSP problem using CPLEX 11.0, the present modified DE (mde) algorithm and the Genetic Algorithm (GA). The comparison is based on two main indicators, which is the value of objective function Z (in ton) and the computational time (in hour, minute and second).
25 Experimental Example According to the date of the solutions, we can note the impressive reduction of the CPU time of our approach which is up to 95.75% with the average value 87.84%. Even though GA achieved the reduction of CPU time with 85.96% on average, GA has a poor performance in solutions of Z functions value. The results we got averagely are about 3.14% greater than the optimal values and only 4.81% in the worst case, and the gap value between the results obtained by GA and the optimal are 7.59%.
26 Experimental Example Then we notice that, the consideration of HC containers increases the complexity of solving CSP problem especially in case 3, 7 and 10 with a large proportion in which superiority of mde is more significant. In practice, at least half an hour is required to draw up a specific stowage plan. Even though the model can find the optimal value of the objective function, it is time-consuming and inefficient. The sub-optimal solutions obtained by our approach can satisfy the practical stability requirement, and is more efficient than the model and the manual operation.
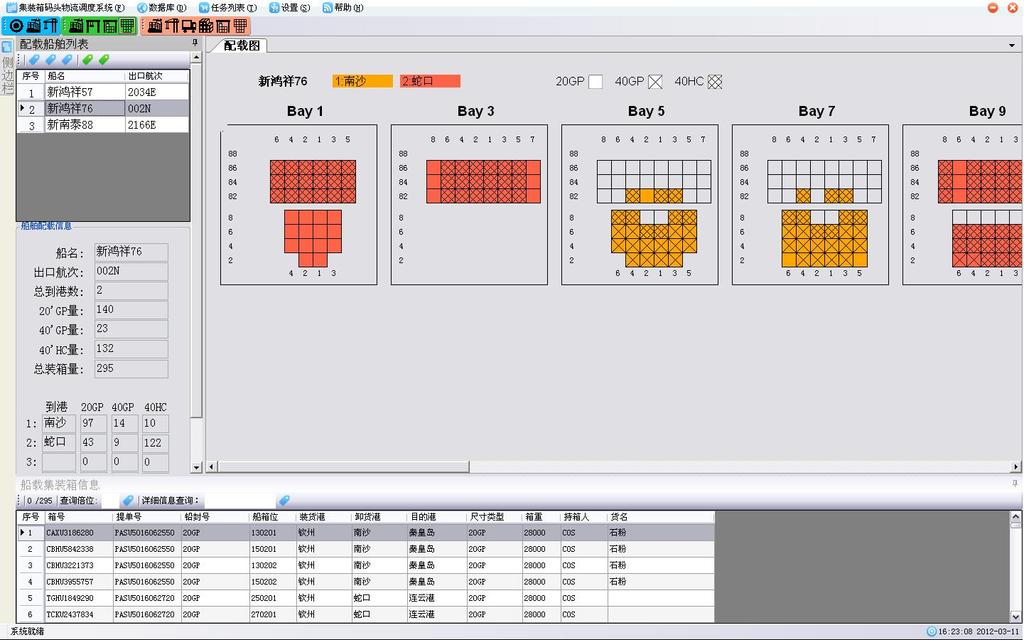
27 Conclusion In this paper we have presented a multi-objective model for the CSP problem with the consideration of the irregular structure of the ship hold and three most commonly size containers, and a modified DE algorithm for solving the CSP problem. The proposed solution method has very good performances in terms of both solution quality and computational time in large scale cases. Moreover, our approach for solving the CSP has been used in the schedule central of a container terminal.
28






29 Thanks for your attention! Speaker: Dr. Yun Dong Supervisor: Pro. Lixin Tang The Logistics Institute, Northeastern University, Shenyang, China