AEM 5495 Spring Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs)
|
|
|
- Mercy Franklin
- 6 years ago
- Views:
Transcription
1 AEM 5495 Spring 2011 Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs) Gary J. Balas Monday-Wednesday 3:35-4:50 PM 211 Akerman Hall
2 UAV Course Syllabus The course is concerned with the design, building, modeling, simulation, testing and flying of uninhabited aerial vehicles (UAVs). The focus is on the Use of rapid prototyping software tools for vehicle modeling, guidance, navigation, and flight control; Real-time implementation, software-in-the-loop and hardware-in-the-loop simulation; and flight tests. Students will get hands-on experience of the entire UAV design cycle. They will learn to 1.Translate mission level specifications and requirements into vehicle level sizing, performance, reliability, and safety specifications. 2.System level design requirements for UAV systems, system architectures and cost tradeoffs.
3 UAV Course Syllabus cont d 3. Select actuators, sensors, communication systems, microcontrollers, and real-time computers to meet system level specifications. 4. Develop equations of motion for small UAVs from first principles. 5. Develop linear and nonlinear models of a small UAV from the equations of motion and simulate their response to control inputs and disturbances. 6. Analyze the stability and control characteristics of the aircraft. 7. Use open-loop flight test data to identify and validate the UAV model based on first principles modeling. 8. Design flight control laws using feedback to achieve desire dynamic characteristics of the vehicle. 9. Implement and test feedback control algorithms in linear and nonlinear UAV simulation models. 10.An overview of Kalman filtering, GPS, inertial measurement units (IMUs), aircraft navigation and guidance to generate vehicle state information.
4 UAV Course Syllabus cont d 11.Integrate guidance and navigation algorithms into the nonlinear UAV simulation. 12. Implement guidance, navigation and feedback control algorithms in realtime and verify that they execute properly in software-in-the-loop and hardware-in-the-loop simulations. 13.Perform closed-loop flight tests with real-time implementation of guidance, navigation and feedback control algorithms. 14. Compare closed-loop experimental flight test data with simulation data. 15. Redesign and flight test of flight control laws. Course Objective Design, simulate, test and fly inner and outer-loop flight control laws for the candidate UAV. Control algorithms will be updated and redesigned based on software-inthe-loop, hardware-in-the-loop and flight tests. Students will work in groups of 5 or 6 to accomplish these objectives.
5 UAV Course Syllabus cont d Prerequisite for AEM Students: AEM 2301 Mechanics of Flight AEM 4601 Instrumentation Lab AEM 4202 Aerodynamics AEM 4303W Flight Dynamics and Control. Prerequisite for EE, ME, CS Students Engineering courses in their discipline. Dynamic system modeling, controls, programming and/or real-time systems Programming in C, MATLAB and Simulink, Familiar with serial communication, sampling, acquiring data using an A/D convertor and generating output data using D/A conversion.

6 UAV Course Syllabus cont d Hardware/Software Requirements MATLAB/Simulink will be the main software environment. Students will develop programs in C and integrate them into the MATLAB/Simulink environment. Two UAV simulation stations will available for the groups to implement and test their algorithms. Students will work in groups of 5 or 6 to accomplish these objectives. The students will work with an Ultra Stick radio controlled airplane. Avionics hardware includes Crossbow MicroNAV sensor Phytec MPC-5200 microcontroller PWM actuators for the surfaces Radio-modem

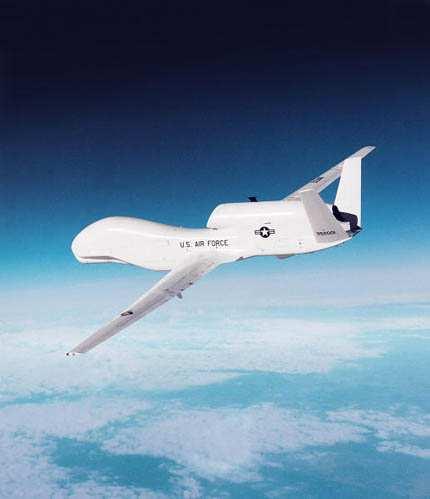


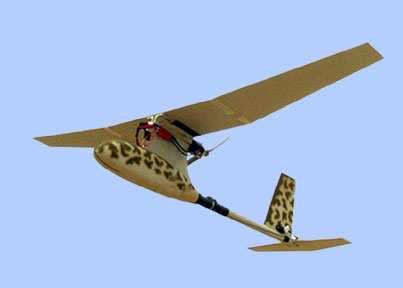

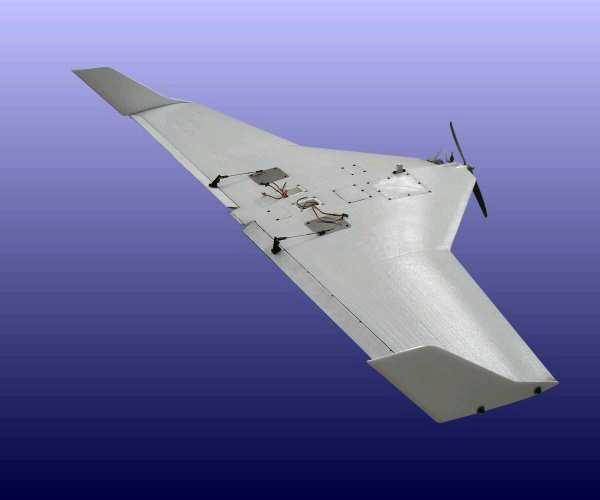
7 UAV Requirements and Specifications Neptune Raven FPASS Dragon Eye Organic Air Vehicle Global hawk Predator





8 UAV Requirements and Specifications Predator B Pioneer UCAV Dragon Drone FPASS Dragon Drone Pointer
9 UAV Requirements and Specifications US Department of Defense (DoD) has 20 UAVs in service or under conceptual development: DoD will have invested over $10 Billion in UAVs by 2007*. DoD UAV systems will grow to 300 by the year 2010*. 32 Nations are developing more than 250 models of UAVs*. Over 60 small and Micro UAV programs are under way through out the world. * DoD Unmanned Aerial Vehicle Roadmap:
10 UAV Requirements and Specifications Requirement Analysis Needs Assessment Mission Analysis UAV Product Mission Requirement s Automation Vehicle Design Process UAV Automated Design Automation Tools Mission Profile Mission Systems Automated Systems System Analysis Hybrid Systems Unmanned Payload Mission Payload Unmanned System Off-the-Shelf System Tools
11 Requirements and Design Requirements Analysis Detailed analysis to define mission requirements. System Analysis Requirements of mission profiles and automated systems Unmanned Payload Analysis Mission payload suitable for manned, unmanned and hybrid systems. Automation Design process resulting in specific UAV design and systems.
12 Requirement Proposal Document (RPD) Specification Operational needs and environment as established by the customer. Critical design requirements that govern preliminary design are: Payload, cruise speed, mission range, power Operational design constraints: physical vehicle dimensions, noise, flight envelope Safety standards: weight, altitude, communication, engine, avionics, infrastructure Endurance at mission range, operation ceiling
13 Mission Analysis Mission viability and mission profile. Classification of missions: Civilian Missions High altitude science Reconnaissance & Surveillance Fire Detection & Monitoring Communication relay Traffic monitoring Entertainment, movies Sensor deployment Others Agricultural Aide Forestry Vigilance Disaster Relief Weather and environmental monitoring Animal observation Documentation- architecture, geologic
14 Mission Analysis Defense Missions Imagery & geo-locate Target data Illuminate, range and designate Detect, identify, geo-locate, communicate Detect nuclear, biological and chemical emissions Dispense sensors, agents, weapons Tactical Defense Missions Deploy forces, maneuvers Collect intelligence Command and control Acquire, analyze, communicate information and status Recue and recover Track troops, weapons
15 Mission System Analysis: Payload Classification Sensors Acoustics, target locators, speed measurement, imagery, magnetics Communications Transmitters, transponders, emitters, amplifiers, voice relays, telemetry Electro-Optical EO/IR, line scanners, integral optical sensors Vehicle selection and design






16 Vehicle Selection and Design Airships Fixed-Wing Planes Rotorcraft
WHITE PAPER. UAVs ew Surveillance and Reconnaissance Options for the Battlefield, Homeland Defense, Law Enforcement, and Disaster Response
 WHITE PAPER UAVs ew Surveillance and Reconnaissance Options for the Battlefield, Homeland Defense, Law Enforcement, and Disaster Response By: PICS, Inc. 7620 Slater Overland Park, KS 66204 Contact: Mike
WHITE PAPER UAVs ew Surveillance and Reconnaissance Options for the Battlefield, Homeland Defense, Law Enforcement, and Disaster Response By: PICS, Inc. 7620 Slater Overland Park, KS 66204 Contact: Mike
PROJECT TITLE: USE OF DRONE IN ABC CONSTRUCTION
 PROJECT TITLE: USE OF DRONE IN ABC CONSTRUCTION Quarterly Progress Report For the period ending December 1 st, 2018 Submitted by: Pezhman Mardanpour (PI) Department of Mechanical and Materials Engineering
PROJECT TITLE: USE OF DRONE IN ABC CONSTRUCTION Quarterly Progress Report For the period ending December 1 st, 2018 Submitted by: Pezhman Mardanpour (PI) Department of Mechanical and Materials Engineering
Modeling and Control of Small and Mini Rotorcraft UAVs
 Contents 1 Introduction... 1 1.1 What are Unmanned Aerial Vehicles (UAVs) and Micro Aerial Vehicles (MAVs)?... 2 1.2 Unmanned Aerial Vehicles and Micro Aerial Vehicles: Definitions, History,Classification,
Contents 1 Introduction... 1 1.1 What are Unmanned Aerial Vehicles (UAVs) and Micro Aerial Vehicles (MAVs)?... 2 1.2 Unmanned Aerial Vehicles and Micro Aerial Vehicles: Definitions, History,Classification,
Custom Small UAV Lab. To: Dr. Lewis Ntaimo ISEN
 Custom Small UAV Lab To: Dr. Lewis Ntaimo ISEN 689-601 From: Gerardo Iglesias, Sugiri Halim, William, Zane Singleton March 20, 2008 I. Statement of Problem Current development and research in the field
Custom Small UAV Lab To: Dr. Lewis Ntaimo ISEN 689-601 From: Gerardo Iglesias, Sugiri Halim, William, Zane Singleton March 20, 2008 I. Statement of Problem Current development and research in the field
Visual Relative Navigation
 Visual Relative Navigation Mr. Scott Wierzbanowski Program Manager, DARPA TTO STTR 18.C Virtual Industry Day Distribution F: Further dissemination only as directed by DARPA/TTO or higher DoD authority
Visual Relative Navigation Mr. Scott Wierzbanowski Program Manager, DARPA TTO STTR 18.C Virtual Industry Day Distribution F: Further dissemination only as directed by DARPA/TTO or higher DoD authority
8/28/2018. UAS110 Intro to UAV Systems 1: Overview and Background. UAS110 Intro to Unmanned Aerial Systems. Initial Definitions: UAV
 UAS110 Intro to Unmanned Aerial Systems 1: Overview & Background 2018 J. Sumey California University of PA rev. 8/28/18 Initial Definitions: UAV UAV = Unmanned Aerial Vehicle def: an unmanned (uninhabited)
UAS110 Intro to Unmanned Aerial Systems 1: Overview & Background 2018 J. Sumey California University of PA rev. 8/28/18 Initial Definitions: UAV UAV = Unmanned Aerial Vehicle def: an unmanned (uninhabited)
RPAS Swarms in Disaster Management Missions
 DLR.de Chart 1 RPAS Swarms in Disaster Management Missions Efficient Deployment through Optimized Mission Planning Julia Zillies, Dagi Geister DLR.de Chart 2 Introduction RPAS Deployment in Disaster Management
DLR.de Chart 1 RPAS Swarms in Disaster Management Missions Efficient Deployment through Optimized Mission Planning Julia Zillies, Dagi Geister DLR.de Chart 2 Introduction RPAS Deployment in Disaster Management
PROJECT TITLE: USE OF DRONE IN ABC CONSTRUCTION
 PROJECT TITLE: USE OF DRONE IN ABC CONSTRUCTION Quarterly Progress Report For the period ending September 1 st, 2018 Submitted by: Pezhman Mardanpour (PI) Department of Mechanical and Materials Engineering
PROJECT TITLE: USE OF DRONE IN ABC CONSTRUCTION Quarterly Progress Report For the period ending September 1 st, 2018 Submitted by: Pezhman Mardanpour (PI) Department of Mechanical and Materials Engineering
Fixed-Wing Survey Drone. Students:
 Fixed-Wing Survey Drone Functional Description and System Block Diagram Students: Ben Gorgan Danielle Johnson Faculty Advisor: Dr. Joseph A. Driscoll Date: October 1, 2013 Introduction This project will
Fixed-Wing Survey Drone Functional Description and System Block Diagram Students: Ben Gorgan Danielle Johnson Faculty Advisor: Dr. Joseph A. Driscoll Date: October 1, 2013 Introduction This project will
Collaboration Between Unmanned Aerial and Ground Vehicles. Dr. Daisy Tang
 Collaboration Between Unmanned Aerial and Ground Vehicles Dr. Daisy Tang Key Components Autonomous control of individual agent Collaborative system Mission planning Task allocation Communication Data fusion
Collaboration Between Unmanned Aerial and Ground Vehicles Dr. Daisy Tang Key Components Autonomous control of individual agent Collaborative system Mission planning Task allocation Communication Data fusion
Fixed Wing Survey Drone. Students:
 Fixed Wing Survey Drone Project Proposal Students: Ben Gorgan Danielle Johnson Faculty Advisor: Dr. Joseph A. Driscoll Date: November, 26 2013 1 Project Summary This project will develop an unmanned aerial
Fixed Wing Survey Drone Project Proposal Students: Ben Gorgan Danielle Johnson Faculty Advisor: Dr. Joseph A. Driscoll Date: November, 26 2013 1 Project Summary This project will develop an unmanned aerial
Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage
 The 2008 ICRA Workshop on Cooperative Control of Multiple Heterogeneous UAVs for Coverage and Surveillance Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage Peng Cheng Jim Keller Vijay
The 2008 ICRA Workshop on Cooperative Control of Multiple Heterogeneous UAVs for Coverage and Surveillance Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage Peng Cheng Jim Keller Vijay
2002 Design Task: (Option 1) High Performance Multi-Role Unmanned Aerial Vehicle (UAV)
 High Performance Multi-Role Unmanned Aerial Vehicle (UAV)") AERO 4400 Aircraft Design 3 2002 Design Task: (Option 1) High Performance Multi-Role Unmanned Aerial Vehicle (UAV) 6 credit points Assessment: This task, with four (4) hand-in assignments (detailed separately)
AERO 4400 Aircraft Design 3 2002 Design Task: (Option 1) High Performance Multi-Role Unmanned Aerial Vehicle (UAV) 6 credit points Assessment: This task, with four (4) hand-in assignments (detailed separately)
NON-MILITARY UAV APPLICATIONS. Dr Alexander V Koldaev. February 2007 ABSTRACT
 NON-MILITARY UAV APPLICATIONS Dr Alexander V Koldaev February 2007 ABSTRACT At present time there exists on-going need and demand for air vehicles and services for the real-time remote sensing both at
NON-MILITARY UAV APPLICATIONS Dr Alexander V Koldaev February 2007 ABSTRACT At present time there exists on-going need and demand for air vehicles and services for the real-time remote sensing both at
Common FAA and UAS Terms
 Common FAA and UAS Terms FAA- Federal Aviation Administration From their website: Summary of Activities We're responsible for the safety of civil aviation. The Federal Aviation Act of 1958 created the
Common FAA and UAS Terms FAA- Federal Aviation Administration From their website: Summary of Activities We're responsible for the safety of civil aviation. The Federal Aviation Act of 1958 created the
Terms of Reference. Purchase of aerial surveillance service for the EU external land borders
 Annex II Terms of Reference Purchase of aerial surveillance service for the EU external land borders Ref. No: Frontex/ Purchase of aerial border surveillance service aircraft equipped with multi-intelligence
Annex II Terms of Reference Purchase of aerial surveillance service for the EU external land borders Ref. No: Frontex/ Purchase of aerial border surveillance service aircraft equipped with multi-intelligence
Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018
 24/09/2018 Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018 Most of the connectors used in the small, hand-launched military UAVs typical of swarming drones
24/09/2018 Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018 Most of the connectors used in the small, hand-launched military UAVs typical of swarming drones
AeroVironment, Inc. Unmanned Aircraft Systems Overview. Background
 AeroVironment, Inc. Unmanned Aircraft Systems Overview Background AeroVironment provides customers with more actionable intelligence so they can proceed with certainty. Based in California, AeroVironment
AeroVironment, Inc. Unmanned Aircraft Systems Overview Background AeroVironment provides customers with more actionable intelligence so they can proceed with certainty. Based in California, AeroVironment
CHAPTER 1 INTRODUCTION
 1 CHAPTER 1 INTRODUCTION 1.1 INTRODUCTION Unmanned Aerial Vehicles (UAVs) are gaining wide acceptance as tools in various industries, in civil as well as military applications. Many UAV systems are expensive
1 CHAPTER 1 INTRODUCTION 1.1 INTRODUCTION Unmanned Aerial Vehicles (UAVs) are gaining wide acceptance as tools in various industries, in civil as well as military applications. Many UAV systems are expensive
UNCLASSIFIED UNCLASSIFIED
 : February 206 Exhibit R2, RDT&E Budget Item Justification: PB 207 000: Research, Development, Test & Evaluation, DefenseWide / BA 7: Operational Systems Development COST ($ in Millions) R Program Element
: February 206 Exhibit R2, RDT&E Budget Item Justification: PB 207 000: Research, Development, Test & Evaluation, DefenseWide / BA 7: Operational Systems Development COST ($ in Millions) R Program Element
Multi-view Configuration of Flight Dynamic Playback
 Multi-view Configuration of Flight Dynamic Playback Elizabeth Beth Fatusin Electrical and Computer Engineering Ohlone College / Cornell University bisolafatusi@hotmail.com Faculty Mentor: S. Shankar Sastry
Multi-view Configuration of Flight Dynamic Playback Elizabeth Beth Fatusin Electrical and Computer Engineering Ohlone College / Cornell University bisolafatusi@hotmail.com Faculty Mentor: S. Shankar Sastry
Unmanned Aerial Systems
 Unmanned Aerial Systems Products & Services Design, Development & Manufacture by: i-grandee Unmanned Systems Pvt. Ltd. No. 5, Kamaraj Colony, Chitlapakkam Chennai - 600064, Tamil Nadu, India www.igrandeeums.com
Unmanned Aerial Systems Products & Services Design, Development & Manufacture by: i-grandee Unmanned Systems Pvt. Ltd. No. 5, Kamaraj Colony, Chitlapakkam Chennai - 600064, Tamil Nadu, India www.igrandeeums.com
monitoring it i volcanic gas sampling and analysis
 Volcan, an autonomous volcanic gas sampling Unmanned Aerial Vehicle outbreak of a crisis: identification of causes and effects,, rescue coordination,, first aid volcanic area surveillance and monitoring
Volcan, an autonomous volcanic gas sampling Unmanned Aerial Vehicle outbreak of a crisis: identification of causes and effects,, rescue coordination,, first aid volcanic area surveillance and monitoring
EE5110/6110 Special Topics in Automation and Control
 EE5110/6110 Special Topics in Automation and Control Introduction to Unmanned Aerial Vehicles Ben M. Chen Professor & Provost s Chair Department of Electrical & Computer Engineering Office: E4 06 08, Phone:
EE5110/6110 Special Topics in Automation and Control Introduction to Unmanned Aerial Vehicles Ben M. Chen Professor & Provost s Chair Department of Electrical & Computer Engineering Office: E4 06 08, Phone:
A Smarter Way to Work Drones and Export Controls
 Drones and Export Controls Brent Connor Thompson Hine LLP Washington, D.C. Brent.Connor@ThompsonHine.com 202.263.4188 April 20, 2017 Introduction Enforcement Agencies Export Controls Pertaining to Drones
Drones and Export Controls Brent Connor Thompson Hine LLP Washington, D.C. Brent.Connor@ThompsonHine.com 202.263.4188 April 20, 2017 Introduction Enforcement Agencies Export Controls Pertaining to Drones
UAV SPATIAL MOTION MODEL IDENTIFICATION I. INTRODUCTION
 Prof. Dr. SZABOLCSI, Róbert 1, UAV SPATIAL MOTION MODEL IDENTIFICATION Abstract UAV includes ide variety of aircraft designed for special tasks. Many UAV applications use model aircraft to carry payload
Prof. Dr. SZABOLCSI, Róbert 1, UAV SPATIAL MOTION MODEL IDENTIFICATION Abstract UAV includes ide variety of aircraft designed for special tasks. Many UAV applications use model aircraft to carry payload
AeroVironment, Inc. Unmanned Aircraft Systems Overview. Background
 AeroVironment, Inc. Unmanned Aircraft Systems Overview Background AeroVironment ( AV ) is a technology company with a 40-year history of practical innovation in the fields of unmanned aircraft systems
AeroVironment, Inc. Unmanned Aircraft Systems Overview Background AeroVironment ( AV ) is a technology company with a 40-year history of practical innovation in the fields of unmanned aircraft systems
TMP-Alpha Unmanned Systems
 TMP-Alpha Unmanned Systems We fly into the future TMP-Alpha Unmanned Systems is a leading designer, developer, producer of small UAVs (Unmanned Aerial Vehicles), as well as an integrator of enhanced technology
TMP-Alpha Unmanned Systems We fly into the future TMP-Alpha Unmanned Systems is a leading designer, developer, producer of small UAVs (Unmanned Aerial Vehicles), as well as an integrator of enhanced technology
UAV-Based Flight Inspection System
 UAV-Based Flight Inspection System Yanbo Zhu, National Key CNS/ATM Laboratory, CAAC Xiaofeng Shi, Beihang University Kai Kang, Dongying Institute of Beihang University BIOGRAPHY Yanbo Zhu, Chief Engineer
UAV-Based Flight Inspection System Yanbo Zhu, National Key CNS/ATM Laboratory, CAAC Xiaofeng Shi, Beihang University Kai Kang, Dongying Institute of Beihang University BIOGRAPHY Yanbo Zhu, Chief Engineer
An Operator Function Taxonomy for Unmanned Aerial Vehicle Missions. Carl E. Nehme Jacob W. Crandall M. L. Cummings
 An Operator Function Taxonomy for Unmanned Aerial Vehicle Missions Carl E. Nehme Jacob W. Crandall M. L. Cummings Motivation UAVs being asked to perform more and more missions Military Commercial Predator
An Operator Function Taxonomy for Unmanned Aerial Vehicle Missions Carl E. Nehme Jacob W. Crandall M. L. Cummings Motivation UAVs being asked to perform more and more missions Military Commercial Predator
Figure 1 Hybrid wing high-altitude long-endurance UAV
 GSMA Internet of Things Case Study Ground-to-air LTE communication services for industrial drone applications Executive Summary With the increasing use of drones for industrial applications, China Unicom
GSMA Internet of Things Case Study Ground-to-air LTE communication services for industrial drone applications Executive Summary With the increasing use of drones for industrial applications, China Unicom
Growth Opportunity in Global UAV Market
 Growth Opportunity in Global UAV Market Lucintel Brief Published: March 2011 Lucintel 1320 Greenway Dr., Suite 870, Las Colinas, TX 75038, USA. Tel: +1-972-636-5056, E-mail: helpdesk@lucintel.com Copyright
Growth Opportunity in Global UAV Market Lucintel Brief Published: March 2011 Lucintel 1320 Greenway Dr., Suite 870, Las Colinas, TX 75038, USA. Tel: +1-972-636-5056, E-mail: helpdesk@lucintel.com Copyright
The Mothership - UAV swarms inspire research into flying aircraft carriers
 The Mothership - UAV swarms inspire research into flying aircraft carriers Airforce-technology Unmanned aerial systems (UAS) have already transformed military operations but an ambitious new project from
The Mothership - UAV swarms inspire research into flying aircraft carriers Airforce-technology Unmanned aerial systems (UAS) have already transformed military operations but an ambitious new project from
A UAV MISSION HIERARCHY C. E. NEHME M.L. CUMMINGS J. W. CRANDALL
 A UAV MISSION HIERARCHY C. E. NEHME M.L. CUMMINGS J. W. CRANDALL MASSACHUSETTS INSTITUTE OF TECHNOLOGY* PREPARED FOR CHARLES RIVER ANALYTICS HAL2006-09 DEC, 2006 \ http://halab.mit.edu e-mail: halab@mit.edu
A UAV MISSION HIERARCHY C. E. NEHME M.L. CUMMINGS J. W. CRANDALL MASSACHUSETTS INSTITUTE OF TECHNOLOGY* PREPARED FOR CHARLES RIVER ANALYTICS HAL2006-09 DEC, 2006 \ http://halab.mit.edu e-mail: halab@mit.edu
Tactical Technology Office
 Tactical Technology Office Pamela A. Melroy, Deputy Director Briefing prepared for the Aeronautics and Space Engineering Board (ASEB) April 2, 2014 Mission The Defense Advanced Research Projects Agency
Tactical Technology Office Pamela A. Melroy, Deputy Director Briefing prepared for the Aeronautics and Space Engineering Board (ASEB) April 2, 2014 Mission The Defense Advanced Research Projects Agency
Auto Pilot Controlled Flying Wing (UAV) For QRF (Quick Reaction Armed Forces)
 For QRF (Quick Reaction Armed Forces)") IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 12, Issue 6 Ver. II (Nov. - Dec. 2015), PP 43-47 www.iosrjournals.org Auto Pilot Controlled Flying
IOSR Journal of Mechanical and Civil Engineering (IOSR-JMCE) e-issn: 2278-1684,p-ISSN: 2320-334X, Volume 12, Issue 6 Ver. II (Nov. - Dec. 2015), PP 43-47 www.iosrjournals.org Auto Pilot Controlled Flying
Low Cost Aerial Mapping Alternatives for Natural Disasters in the Caribbean
 Low Cost Aerial Mapping Alternatives for Natural Disasters in the Caribbean Raid Al-Tahir, Marcus Arthur, and Dexter Davis The University of the West Indies, Trinidad and Tobago Presentation Outline: The
Low Cost Aerial Mapping Alternatives for Natural Disasters in the Caribbean Raid Al-Tahir, Marcus Arthur, and Dexter Davis The University of the West Indies, Trinidad and Tobago Presentation Outline: The
White Paper. RTOS Considerations for Unmanned Air Vehicles
 RTOS Considerations for Unmanned Air Vehicles Table of Contents 1. Introduction 3 2. UAV History 3 3. UAS - Unmanned Airborne System. 4 4. Certification Authority Outlook 6 5. Multicore Processor Dilemma
RTOS Considerations for Unmanned Air Vehicles Table of Contents 1. Introduction 3 2. UAV History 3 3. UAS - Unmanned Airborne System. 4 4. Certification Authority Outlook 6 5. Multicore Processor Dilemma
Life Science Journal 2014;11(11)
") Design of Unmanned Aerial Vehicle Autopilot based on Freescale Qorivva 32-bit Microcontroller Abid Abbasi 1, 2, Ubaid M. Al-Saggaf 1, 2, Khalid Munawar 1, 2 1. Center of Excellence in Intelligent Engineering
Design of Unmanned Aerial Vehicle Autopilot based on Freescale Qorivva 32-bit Microcontroller Abid Abbasi 1, 2, Ubaid M. Al-Saggaf 1, 2, Khalid Munawar 1, 2 1. Center of Excellence in Intelligent Engineering
Image-based Navigation for Shipboard
 Image-based Navigation for Shipboard Landing (INAV-SL) Navy TAP 2014 June 1-4, 2014 www.ssci.com Ship based UAS require robust auto-landing Ship based UAS require robust auto landing capabilities: Wide
Image-based Navigation for Shipboard Landing (INAV-SL) Navy TAP 2014 June 1-4, 2014 www.ssci.com Ship based UAS require robust auto-landing Ship based UAS require robust auto landing capabilities: Wide
Software Productivity Domains
 Workshop Notes Software Software Application Difficulties Very Easy Risks are well understood with little loss from failure Business or operational logic is straightforward Limited interface to other software
Workshop Notes Software Software Application Difficulties Very Easy Risks are well understood with little loss from failure Business or operational logic is straightforward Limited interface to other software
Click to edit Master title style. Optimal Trajectory Generation for Aerial Towed Cable System Using APMonitor
 Click to edit Master title style Optimal Trajectory Generation for Aerial Towed Cable System Using APMonitor Liang Sun Multiple AGent Intelligent Coordination & Control (MAGICC) Laboratory Department of
Click to edit Master title style Optimal Trajectory Generation for Aerial Towed Cable System Using APMonitor Liang Sun Multiple AGent Intelligent Coordination & Control (MAGICC) Laboratory Department of
UAVs in an Australian Maritime Environment. Marc Ware Lieutenant Commander RAN 14 July 2003
 UAVs in an Australian Maritime Environment Marc Ware Lieutenant Commander RAN 14 July 2003 LCDR Marc Ware BSc BAvn MSc 23 years service in the RAN 2600 hours total flying experience 1400 hours Seahawk
UAVs in an Australian Maritime Environment Marc Ware Lieutenant Commander RAN 14 July 2003 LCDR Marc Ware BSc BAvn MSc 23 years service in the RAN 2600 hours total flying experience 1400 hours Seahawk
Executive Summary. Revision chart and history log "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" Contract B-0068-GEM3-GC
 Contract B-0068-GEM3-GC") Project "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" under Contract B-0068-GEM3-GC Executive Summary Period covered: 04.08.09 31.05.10 Issue Date: 30.06.2010 Start date of project: 04.08.09 Duration: 9 months
Project "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" under Contract B-0068-GEM3-GC Executive Summary Period covered: 04.08.09 31.05.10 Issue Date: 30.06.2010 Start date of project: 04.08.09 Duration: 9 months
S.T.E.M. Integrated Robotics Detailed Outline
 S.T.E.M. Integrated Robotics Detailed Outline Unit 1: An Introduction to Drones Time: 4 Days Lesson 1.1 Introduction to MINDS-i 1. A brief intro of how MINDS-i defines STEM education and STEM Integrated
S.T.E.M. Integrated Robotics Detailed Outline Unit 1: An Introduction to Drones Time: 4 Days Lesson 1.1 Introduction to MINDS-i 1. A brief intro of how MINDS-i defines STEM education and STEM Integrated
Sentinel Embedded Computer:
 Sentinel Embedded Computer: Redefining C-UAS Rugged Computer Capability Learn More systelusa.com Email sales@systelusa.com CONTACT! - SMALL ENEMY ROTARY WING UAV - POSSIBLY WEAPONIZED - MOVING EAST TO
Sentinel Embedded Computer: Redefining C-UAS Rugged Computer Capability Learn More systelusa.com Email sales@systelusa.com CONTACT! - SMALL ENEMY ROTARY WING UAV - POSSIBLY WEAPONIZED - MOVING EAST TO
FY14 RWDC State Unmanned Aircraft System Challenge: Precision Agriculture
 FY14 RWDC State Unmanned Aircraft System Challenge: Precision Agriculture Background By 2050 there will be an estimated additional two billion people on Earth, which will significantly impact the availability
FY14 RWDC State Unmanned Aircraft System Challenge: Precision Agriculture Background By 2050 there will be an estimated additional two billion people on Earth, which will significantly impact the availability
NASA Aeronautics Strategic Thrust: Assured Autonomy for Aviation Transformation Vision and Roadmap
 National Aeronautics and Space Administration NASA Aeronautics Strategic Thrust: Assured Autonomy for Aviation Transformation Vision and Roadmap Sharon Graves March 9, 2016 1 2 Why an Aviation Autonomy
National Aeronautics and Space Administration NASA Aeronautics Strategic Thrust: Assured Autonomy for Aviation Transformation Vision and Roadmap Sharon Graves March 9, 2016 1 2 Why an Aviation Autonomy
Military and Commercial Drones: -- Markets Reach $16.1 Billion By 2021
 Military and Commercial Drones: -- Markets Reach $16.1 Billion By 2021 LEXINGTON, Massachusetts (July 30, 2015) WinterGreen Research announces that it has published a new study Drones: Trains, Planes,
Military and Commercial Drones: -- Markets Reach $16.1 Billion By 2021 LEXINGTON, Massachusetts (July 30, 2015) WinterGreen Research announces that it has published a new study Drones: Trains, Planes,
DESIGN AND DEVELOPMENT OF UCAV (DRONE) FOR SURVEILLANCE
 FOR SURVEILLANCE") DESIGN AND DEVELOPMENT OF UCAV (DRONE) FOR SURVEILLANCE Kanika Rawat Department of Aerospace Engg MRSPTU Bathinda Punjab, INDIA Abstract Abstract In this paper my main emphasis is on Uninhabited aerial
DESIGN AND DEVELOPMENT OF UCAV (DRONE) FOR SURVEILLANCE Kanika Rawat Department of Aerospace Engg MRSPTU Bathinda Punjab, INDIA Abstract Abstract In this paper my main emphasis is on Uninhabited aerial
A test bed for rapid flight testing of UAV control algorithms
 A test bed for rapid flight testing of UAV control algorithms Tiago Oliveira, Gonçalo Cruz, Eduardo R. B. Marques and Pedro Encarnação Academia da Força Aérea Portuguesa, Portugal, tmoliveira@academiafa.edu.pt
A test bed for rapid flight testing of UAV control algorithms Tiago Oliveira, Gonçalo Cruz, Eduardo R. B. Marques and Pedro Encarnação Academia da Força Aérea Portuguesa, Portugal, tmoliveira@academiafa.edu.pt
VTOL UAV for Maritime ISR Role
 VTOL UAV for Page -1 The Maritime Arena Challenge Peace keeping / LIC scenarios: Over the Horizon ISR missions Low risk / LCC operation HIC / War time: Missile Threat - Standoff range Surface Warfare Littoral
VTOL UAV for Page -1 The Maritime Arena Challenge Peace keeping / LIC scenarios: Over the Horizon ISR missions Low risk / LCC operation HIC / War time: Missile Threat - Standoff range Surface Warfare Littoral
Potential for Using Unmanned Aerial Vehicles (UAV) in an On-Site Inspection
 in an On-Site Inspection") Potential for Using Unmanned Aerial Vehicles (UAV) in an On-Site Inspection Dr James Palmer AWE plc, UK CTBTO Science and Technology Conference 2015 T3.2-06 What is an Unmanned Aerial Vehicle? Different
Potential for Using Unmanned Aerial Vehicles (UAV) in an On-Site Inspection Dr James Palmer AWE plc, UK CTBTO Science and Technology Conference 2015 T3.2-06 What is an Unmanned Aerial Vehicle? Different
Seventh Framework Programme THEME: AAT Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN
 Seventh Framework Programme THEME: AAT.2012.6.3-1. Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN Atomic Gyroscope for Enhanced Navigation Grant agreement no.: 322466 Publishable
Seventh Framework Programme THEME: AAT.2012.6.3-1. Breakthrough and emerging technologies Call: FP7-AAT-2012-RTD-L0 AGEN Atomic Gyroscope for Enhanced Navigation Grant agreement no.: 322466 Publishable
Drones to the Rescue: Utilizing Drones for the Preservation and Restoration of Life and Property. Randall Ishikawa
 Drones to the Rescue: Utilizing Drones for the Preservation and Restoration of Life and Property Randall Ishikawa Agenda 1 2 3 4 5 6 Current Conditions UAS Adoption Aerial Imagery Capabilities Use Cases
Drones to the Rescue: Utilizing Drones for the Preservation and Restoration of Life and Property Randall Ishikawa Agenda 1 2 3 4 5 6 Current Conditions UAS Adoption Aerial Imagery Capabilities Use Cases
EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS. Aerospace Controls Laboratory Massachusetts Institute of Technology
 EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS Ellis King, 1 Mehdi Alighanbari, Jonathan How 3 Aerospace Controls Laboratory Massachusetts Institute of Technology Abstract: This
EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS Ellis King, 1 Mehdi Alighanbari, Jonathan How 3 Aerospace Controls Laboratory Massachusetts Institute of Technology Abstract: This
UAVs as Tactical Wingmen: Control Methods and Pilots Perceptions
 UAVs as Tactical Wingmen: Control Methods and Pilots Perceptions D. Morales, 2nd Lt, USAF M.L. Cummings, PhD Aeronautics and Astronautics Massachusetts Institute of Technology Cambridge, MA 02139 Introduction
UAVs as Tactical Wingmen: Control Methods and Pilots Perceptions D. Morales, 2nd Lt, USAF M.L. Cummings, PhD Aeronautics and Astronautics Massachusetts Institute of Technology Cambridge, MA 02139 Introduction
DRONES A Brief History and Design Overview. Tomorrow Lab June 2014
 DRONES A Brief History and Design Overview Tomorrow Lab June 2014 INTRODUCTION The intent of this document is to give a brief history and overview of drone technology from a design and engineering perspective,
DRONES A Brief History and Design Overview Tomorrow Lab June 2014 INTRODUCTION The intent of this document is to give a brief history and overview of drone technology from a design and engineering perspective,
Human-in-the-Loop Distributed Simulation and Validation of Strategic Autonomous Algorithms
 26th AIAA Aerodynamic Measurement Technology and Ground Testing Conference 23-26 June 2008, Seattle, Washington AIAA 2008-4366 Human-in-the-Loop Distributed Simulation and Validation of Strategic Autonomous
26th AIAA Aerodynamic Measurement Technology and Ground Testing Conference 23-26 June 2008, Seattle, Washington AIAA 2008-4366 Human-in-the-Loop Distributed Simulation and Validation of Strategic Autonomous
Cooperative Control of Heterogeneous Robotic Systems
 Cooperative Control of Heterogeneous Robotic Systems N. Mišković, S. Bogdan, I. Petrović and Z. Vukić Department of Control And Computer Engineering Faculty of Electrical Engineering and Computing University
Cooperative Control of Heterogeneous Robotic Systems N. Mišković, S. Bogdan, I. Petrović and Z. Vukić Department of Control And Computer Engineering Faculty of Electrical Engineering and Computing University
Navigation and Control of Unmanned Aerial Vehicles in GPS Denied Environments
 Navigation and Control of Unmanned Aerial Vehicles in GPS Denied Environments Ben M. Chen Unmanned Systems Research Group, Dept of Electrical & Computer Engineering Control Science Group, Temasek Laboratories
Navigation and Control of Unmanned Aerial Vehicles in GPS Denied Environments Ben M. Chen Unmanned Systems Research Group, Dept of Electrical & Computer Engineering Control Science Group, Temasek Laboratories
Global UAV Market growth to $28.27 Billion by 2022, driven by civil, commercial, military & security sectors
 Global UAV Market growth to $28.27 Billion by 2022, driven by civil, commercial, military & security sectors The UAV (Unmanned Aerial Market) market is estimated to be USD 13.22 Billion in 2016 and is
Global UAV Market growth to $28.27 Billion by 2022, driven by civil, commercial, military & security sectors The UAV (Unmanned Aerial Market) market is estimated to be USD 13.22 Billion in 2016 and is
Co-operating Miniature UAVs for Surveillance and Reconnaissance
 Co-operating Miniature UAVs for Surveillance and Reconnaissance Axel Bürkle 1, Sandro Leuchter 1 1 Fraunhofer Institute for Information and Data Processing IITB Fraunhoferstraße 1, 76131 Karlsruhe Abstract.
Co-operating Miniature UAVs for Surveillance and Reconnaissance Axel Bürkle 1, Sandro Leuchter 1 1 Fraunhofer Institute for Information and Data Processing IITB Fraunhoferstraße 1, 76131 Karlsruhe Abstract.
Palos Verdes High School 1
 Abstract: The Palos Verdes High School Institute of Technology Aerospace team (PVIT) is proud to present Scout. Scout is a quadcopter weighing in at 1664g including the 3 cell 11.1 volt, 5,000 mah Lithium
Abstract: The Palos Verdes High School Institute of Technology Aerospace team (PVIT) is proud to present Scout. Scout is a quadcopter weighing in at 1664g including the 3 cell 11.1 volt, 5,000 mah Lithium
BHE UAV Family Unmanned Aerial Vehicle System
 BHE UAV Family Unmanned Aerial Vehicle System UAV Development at BHE Bonn Hungary Electronics Ltd. BHE Bonn Hungary Electronics Ltd. Address: Fóti str. 56. Budapest, H-1047 Hungary Phone: (1) 233-2138,
BHE UAV Family Unmanned Aerial Vehicle System UAV Development at BHE Bonn Hungary Electronics Ltd. BHE Bonn Hungary Electronics Ltd. Address: Fóti str. 56. Budapest, H-1047 Hungary Phone: (1) 233-2138,
Swarm Intelligence: a New C2 Paradigm with an Application to the Control of Swarms of UAVs
 Swarm Intelligence: a New C2 Paradigm with an Application to the Control of Swarms of UAVs Paolo Gaudiano Benjamin Shargel Eric Bonabeau Icosystem Corporation Cambridge, MA Bruce T. Clough AFRL Control
Swarm Intelligence: a New C2 Paradigm with an Application to the Control of Swarms of UAVs Paolo Gaudiano Benjamin Shargel Eric Bonabeau Icosystem Corporation Cambridge, MA Bruce T. Clough AFRL Control
VT Group Unmanned Systems Capabilities Brief.
 VT Group Unmanned Systems Capabilities Brief Our Company Our success rests in its three lines of business Integrated Solutions, Technical Services and Unmanned Systems. From providing turnkey engineering
VT Group Unmanned Systems Capabilities Brief Our Company Our success rests in its three lines of business Integrated Solutions, Technical Services and Unmanned Systems. From providing turnkey engineering
Sensor Package Integration for the X-65B Experimental Unmanned Combat Air Vehicle -- Navy (UCAV-N) Statement of Work.
 Statement of Work.") Sensor Package Integration for the X-65B Experimental Unmanned Combat Air Vehicle -- Navy (UCAV-N) Statement of Work Frances Advincula Table of Contents 2.1 Department of Defense Specifications. [I am
Sensor Package Integration for the X-65B Experimental Unmanned Combat Air Vehicle -- Navy (UCAV-N) Statement of Work Frances Advincula Table of Contents 2.1 Department of Defense Specifications. [I am
Development, Validation and Implementation Considerations of a Decision Support System for Unmanned & Autonomous System of Systems Test & Evaluation
 Development, Validation and Implementation Considerations of a Decision Support System for Unmanned & Autonomous System of Systems Test & Evaluation Test Week 2010 Kris Cowart, Maj, USAF Ricardo Valerdi,
Development, Validation and Implementation Considerations of a Decision Support System for Unmanned & Autonomous System of Systems Test & Evaluation Test Week 2010 Kris Cowart, Maj, USAF Ricardo Valerdi,
SIMULATION OF FORWARD AIR CONTROLLER MISSIONS WITH POP-UP TARGETS
 SIMULATION OF FORWARD AIR CONTROLLER MISSIONS WITH POP-UP TARGETS A Paper Submitted to the Graduate Faculty of the North Dakota State University of Agriculture and Applied Science By Sandeep Sikharam In
SIMULATION OF FORWARD AIR CONTROLLER MISSIONS WITH POP-UP TARGETS A Paper Submitted to the Graduate Faculty of the North Dakota State University of Agriculture and Applied Science By Sandeep Sikharam In
Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition
 Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition Feng Guo No.1 Harbin Engineering University, China Peiji Wang No.2 Yuan Yin No.3 Xiaoyan Zheng No.4
Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition Feng Guo No.1 Harbin Engineering University, China Peiji Wang No.2 Yuan Yin No.3 Xiaoyan Zheng No.4
FORMATION FLIGHT OF FIXED-WING UAVS USING ARTIFICIAL POTENTIAL FIELD
 FORMATION FLIGHT OF FIXED-WING UAVS USING ARTIFICIAL POTENTIAL FIELD Yoshitsugu Nagao*and Kenji Uchiyama* *Department of Aerospace Engineering, Nihon University csyo1217@g.nihon-u.ac.jp, uchiyama@aero.cst.nihon-u.ac.jp
FORMATION FLIGHT OF FIXED-WING UAVS USING ARTIFICIAL POTENTIAL FIELD Yoshitsugu Nagao*and Kenji Uchiyama* *Department of Aerospace Engineering, Nihon University csyo1217@g.nihon-u.ac.jp, uchiyama@aero.cst.nihon-u.ac.jp
UNMANNED VEHICLE UNIVERSITY SCHOOL OF UNMANNED TECHNOLOGY
 UNMANNED VEHICLE UNIVERSITY SCHOOL OF UNMANNED TECHNOLOGY CERTIFICATE PLAN CERTIFICATE IN UNMANNED SYSTEMS PROJECT MANAGEMENT DELIVERY MODE: 100% DISTANCE LEARNING CORE UAV301 UAS FUNDAMENTALS 4 CREDITS
UNMANNED VEHICLE UNIVERSITY SCHOOL OF UNMANNED TECHNOLOGY CERTIFICATE PLAN CERTIFICATE IN UNMANNED SYSTEMS PROJECT MANAGEMENT DELIVERY MODE: 100% DISTANCE LEARNING CORE UAV301 UAS FUNDAMENTALS 4 CREDITS
Research & Reviews: Journal of Engineering and Technology
 Research & Reviews: Journal of Engineering and Technology An Analysis for Measure of Effectiveness of an Unmanned Aerial Vehicle Using Simulation Hyunkyung M, Hayoung J*, Euiho S Department of Industrial
Research & Reviews: Journal of Engineering and Technology An Analysis for Measure of Effectiveness of an Unmanned Aerial Vehicle Using Simulation Hyunkyung M, Hayoung J*, Euiho S Department of Industrial
Operations Research in the Department of Defense
 Operations Research in the Department of Defense Jason Daly Senior Operations Analyst for Marine Corps Operational Test and Evaluation Activity (MCOTEA) Outline Background on Operations Research (OR) How
Operations Research in the Department of Defense Jason Daly Senior Operations Analyst for Marine Corps Operational Test and Evaluation Activity (MCOTEA) Outline Background on Operations Research (OR) How
International Journal of Advance Engineering and Research Development DESIGN AND SIMULATION OF AUTONOMOUS PARACHUTE SYSTEM FOR UNMANNED AERIAL VEHICLE
 Scientific Journal of Impact Factor (SJIF): 5.71 International Journal of Advance Engineering and Research Development Volume 5, Issue 06, June -2018 e-issn (O): 2348-4470 p-issn (P): 2348-6406 DESIGN
Scientific Journal of Impact Factor (SJIF): 5.71 International Journal of Advance Engineering and Research Development Volume 5, Issue 06, June -2018 e-issn (O): 2348-4470 p-issn (P): 2348-6406 DESIGN
Unmanned systems for offshore areas: what is available and what is needed. by William Koski
 Unmanned systems for offshore areas: what is available and what is needed by William Koski The Need Offshore areas are sometimes hazardous to conduct aerial and water based studies because: weather can
Unmanned systems for offshore areas: what is available and what is needed by William Koski The Need Offshore areas are sometimes hazardous to conduct aerial and water based studies because: weather can
Flight Dynamics and Trajectory Modeling for a Strategic Long-Endurance Solar Unmanned Aircraft
 Flight Dynamics and Trajectory Modeling for a Strategic Long-Endurance Solar Unmanned Aircraft B. M. Albaker, Member, IEEE UMPEDAC Research Centre, University of Malaya Kuala Lumpur, Malaysia baraaalbaker@um.edu.my
Flight Dynamics and Trajectory Modeling for a Strategic Long-Endurance Solar Unmanned Aircraft B. M. Albaker, Member, IEEE UMPEDAC Research Centre, University of Malaya Kuala Lumpur, Malaysia baraaalbaker@um.edu.my
A Comprehensive Architecture for the 21 st Century. Defense Advanced Research Projects Agency
 A Comprehensive Architecture for the 21 st Century Sam B. Wilson, III Defense Advanced Research Projects Agency swilson@darpa.mil (703) 696-2310 DoD Space Architecture Limits Operational System availability
A Comprehensive Architecture for the 21 st Century Sam B. Wilson, III Defense Advanced Research Projects Agency swilson@darpa.mil (703) 696-2310 DoD Space Architecture Limits Operational System availability
Air Reconnaissance to Ground Intelligent Navigation System
 Air Reconnaissance to Ground Intelligent Navigation System GROUP MEMBERS Hamza Nawaz, EE Jerrod Rout, EE William Isidort, EE Nate Jackson, EE MOTIVATION With the advent and subsequent popularity growth
Air Reconnaissance to Ground Intelligent Navigation System GROUP MEMBERS Hamza Nawaz, EE Jerrod Rout, EE William Isidort, EE Nate Jackson, EE MOTIVATION With the advent and subsequent popularity growth
UAV Development at BHE Bonn Hungary Ltd.
 Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Gyula Mikó, Károly Kazi, János Solymosi, József Földes Fóti
Magyar Kutatók 10. Nemzetközi Szimpóziuma 10 th International Symposium of Hungarian Researchers on Computational Intelligence and Informatics Gyula Mikó, Károly Kazi, János Solymosi, József Földes Fóti
Unmanned Air Vehicle Testbed for Cooperative Control Experiments
 Unmanned Air Vehicle Testbed for Cooperative Control Experiments Tim McLain Department of Mechanical Engineering Brigham Young University Randy Beard Department of Electrical and Computer Engineering Brigham
Unmanned Air Vehicle Testbed for Cooperative Control Experiments Tim McLain Department of Mechanical Engineering Brigham Young University Randy Beard Department of Electrical and Computer Engineering Brigham
From Sensors to Platforms and Sensing Systems
 Building in Autonomy: From Sensors to Platforms and Sensing Systems Kartik B. Ariyur School of Mechanical Engineering Purdue University Purdue University January 17, 2011 Autonomous Navigation: From Sensors
Building in Autonomy: From Sensors to Platforms and Sensing Systems Kartik B. Ariyur School of Mechanical Engineering Purdue University Purdue University January 17, 2011 Autonomous Navigation: From Sensors
Introduction to Intelligent Transportation Systems. Basic Knowledge
 Introduction to Intelligent Transportation Systems Basic Knowledge What is ITS Application of well-established technologies of communication, control, electronics, computer hardware and computer software
Introduction to Intelligent Transportation Systems Basic Knowledge What is ITS Application of well-established technologies of communication, control, electronics, computer hardware and computer software
Control and Application of Multiple UAVs in an Integrated C4ISR Environment
 Control and Application of Multiple UAVs in an Integrated C4ISR Environment Chris M. Herdman* and Ronald V. Kruk** * Carleton University ** CAE Inc. Abstract Unmanned Aircraft Systems (UAS) are becoming
Control and Application of Multiple UAVs in an Integrated C4ISR Environment Chris M. Herdman* and Ronald V. Kruk** * Carleton University ** CAE Inc. Abstract Unmanned Aircraft Systems (UAS) are becoming
Real-time surveillance just got lighter
 Real-time surveillance just got lighter The most important thing we build is trust AVIATOR UAV 200 Enhanced satcom connectivity for tactical UAVs Photo: Andrew Shiva The world s smallest, lightest Inmarsat
Real-time surveillance just got lighter The most important thing we build is trust AVIATOR UAV 200 Enhanced satcom connectivity for tactical UAVs Photo: Andrew Shiva The world s smallest, lightest Inmarsat
A User s Experience with Model-Based Design for GNC-Based Systems
 A User s Experience with Model-Based Design for GNC-Based Systems James E. Craft, Lockheed-Martin Missiles and Fire Control 1 Lockheed Martin Corporation 140,000 Employees 65,000 Scientists and Engineers
A User s Experience with Model-Based Design for GNC-Based Systems James E. Craft, Lockheed-Martin Missiles and Fire Control 1 Lockheed Martin Corporation 140,000 Employees 65,000 Scientists and Engineers
Presentation of the Paper. Learning Monocular Reactive UAV Control in Cluttered Natural Environments
 Presentation of the Paper Learning Monocular Reactive UAV Control in Cluttered Natural Environments Stefany Vanzeler Topics in Robotics Department of Machine Learning and Robotics Institute for Parallel
Presentation of the Paper Learning Monocular Reactive UAV Control in Cluttered Natural Environments Stefany Vanzeler Topics in Robotics Department of Machine Learning and Robotics Institute for Parallel
Longe Range Communication System for Small UAVs
 Longe Range Communication System for Small UAVs Proposal for Master Thesis in Aerospace Engineering Supervisor: André C. Marta, CCTAE, IDMEC andre.marta@tecnico.ulisboa.pt June 2017 ii Goals This work
Longe Range Communication System for Small UAVs Proposal for Master Thesis in Aerospace Engineering Supervisor: André C. Marta, CCTAE, IDMEC andre.marta@tecnico.ulisboa.pt June 2017 ii Goals This work
Mechatronic systems used in aviation Presenter: Varga Ádám Óbuda University Bánki Donát Faculty of Mechanical & Safety Engineering
 Mechatronic systems used in aviation Presenter: Varga Ádám Óbuda University Bánki Donát Faculty of Mechanical & Safety Engineering Importance of aviation: A lot of people travel by aircraft daily, but
Mechatronic systems used in aviation Presenter: Varga Ádám Óbuda University Bánki Donát Faculty of Mechanical & Safety Engineering Importance of aviation: A lot of people travel by aircraft daily, but
Concept Paper. Unmanned Aerial Surveillance for Perimeter Security Missions
 BUSTER Concept Paper Unmanned Aerial Surveillance for Perimeter Security Missions Aerostat Introduction. This paper is submitted to demonstrate a family of concepts for providing aerial surveillance in
BUSTER Concept Paper Unmanned Aerial Surveillance for Perimeter Security Missions Aerostat Introduction. This paper is submitted to demonstrate a family of concepts for providing aerial surveillance in
Use of UAVs for ecosystem monitoring. Genova, July 20 th 2016
 Use of UAVs for ecosystem monitoring Genova, July 20 th 2016 Roberto Colella colella@ba.issia.cnr.it Unmanned Aerial Vehicle An Unmanned Aerial Vehicle (UAV) is an aircraft without a human pilot onboard.
Use of UAVs for ecosystem monitoring Genova, July 20 th 2016 Roberto Colella colella@ba.issia.cnr.it Unmanned Aerial Vehicle An Unmanned Aerial Vehicle (UAV) is an aircraft without a human pilot onboard.
Drone technology has skyrocketed over the past decade driving costs down and the
 I. ABSTRACT Drone technology has skyrocketed over the past decade driving costs down and the number of potential applications up, one being agricultural crop monitoring. Normalized Difference Vegetation
I. ABSTRACT Drone technology has skyrocketed over the past decade driving costs down and the number of potential applications up, one being agricultural crop monitoring. Normalized Difference Vegetation
SURVEYING CONSTRUCTION FORESTRY AGRICULTURE ENVIRONMENT POWER ENGINEERING
 UAV BIRDIE SURVEYING CONSTRUCTION FORESTRY AGRICULTURE ENVIRONMENT POWER ENGINEERING BIRDIE YOUR TAILOR-MADE UAV Dedicated to surveying and agriculture, UAV BIRDIE is a well-tailored drone, combining intuitive
UAV BIRDIE SURVEYING CONSTRUCTION FORESTRY AGRICULTURE ENVIRONMENT POWER ENGINEERING BIRDIE YOUR TAILOR-MADE UAV Dedicated to surveying and agriculture, UAV BIRDIE is a well-tailored drone, combining intuitive
UAV Or Drone Technology using NDVI Imaging For Crop Monitoring
 UAV Or Drone Technology using NDVI Imaging For Crop Monitoring Naufa N N College of Engineering, Trivandrum(CET) ABSTRACT Drone technology has skyrocketed over the past decade driving costs down and the
UAV Or Drone Technology using NDVI Imaging For Crop Monitoring Naufa N N College of Engineering, Trivandrum(CET) ABSTRACT Drone technology has skyrocketed over the past decade driving costs down and the
UNCLASSIFIED. UNCLASSIFIED Army Page 1 of 12 R-1 Line #136
 Exhibit R2, RDT&E Budget Item Justification: PB 2015 Army Date: March 2014 2040: Research, Development, Test & Evaluation, Army / BA 6: RDT&E Management Support COST ($ in Millions) Prior Years FY 2013
Exhibit R2, RDT&E Budget Item Justification: PB 2015 Army Date: March 2014 2040: Research, Development, Test & Evaluation, Army / BA 6: RDT&E Management Support COST ($ in Millions) Prior Years FY 2013
P310 VTOL UAV CHC P310 VTOL UAV. Zhen Yann Zhen Yann - UAV Product Manager UAV Product Manager Shanghai, 15 February,2017 Shanghai - Feburary 15, 2017
 P310 VTOL UAV CHC P310 VTOL UAV Zhen Yann Zhen Yann - UAV Product Manager UAV Product Manager Shanghai, 15 February,2017 Shanghai - Feburary 15, 2017 1 CHC Profile 2 CHC VTOL UAV Introduction 3 4 CHC VTOL
P310 VTOL UAV CHC P310 VTOL UAV Zhen Yann Zhen Yann - UAV Product Manager UAV Product Manager Shanghai, 15 February,2017 Shanghai - Feburary 15, 2017 1 CHC Profile 2 CHC VTOL UAV Introduction 3 4 CHC VTOL
ANCHORS. UAV-Assisted Ad Hoc Networks for Crisis Management and Hostile Environment Sensing. LKA Berlin
 ANCHORS UAV-Assisted Ad Hoc Networks for Crisis Management and Hostile Environment Sensing Das BMBF wird vertreten durch den Projektträger LKA Berlin Scenario & Motivation Wide-spread CBRNe pollutants
ANCHORS UAV-Assisted Ad Hoc Networks for Crisis Management and Hostile Environment Sensing Das BMBF wird vertreten durch den Projektträger LKA Berlin Scenario & Motivation Wide-spread CBRNe pollutants
MultiUAV: A MULTIPLE UAV SIMULATION FOR INVESTIGATION OF COOPERATIVE CONTROL
 Proceedings of the 2002 Winter Simulation Conference E. Yücesan, C.-H. Chen, J. L. Snowdon, and J. M. Charnes, eds. MultiUAV: A MULTIPLE UAV SIMULATION FOR INVESTIGATION OF COOPERATIVE CONTROL S. J. Rasmussen
Proceedings of the 2002 Winter Simulation Conference E. Yücesan, C.-H. Chen, J. L. Snowdon, and J. M. Charnes, eds. MultiUAV: A MULTIPLE UAV SIMULATION FOR INVESTIGATION OF COOPERATIVE CONTROL S. J. Rasmussen
Autonomous Battery Charging of Quadcopter
 ECE 4901 Fall 2016 Project Proposal Autonomous Battery Charging of Quadcopter Thomas Baietto Electrical Engineering Gabriel Bautista Computer Engineering Ryan Oldham Electrical Engineering Yifei Song Electrical
ECE 4901 Fall 2016 Project Proposal Autonomous Battery Charging of Quadcopter Thomas Baietto Electrical Engineering Gabriel Bautista Computer Engineering Ryan Oldham Electrical Engineering Yifei Song Electrical