Smart COordination of UAV Teams (SCOUT): Intelligent Swarm Management. Dick Stottler,
|
|
|
- Elfrieda Skinner
- 6 years ago
- Views:
Transcription
1 Smart COordination of UAV Teams (SCOUT): Intelligent Swarm Management Presented by: Dick Stottler,
2 Overview Stottler Henke Background Project Objectives SCOUT Description Prototype Domains Prototyping Activities Prototype Demonstration Description Prototype Demonstration Videos 2
3 Stottler Henke Background AI R&D Consulting Firm, founded in 1988 AI = Mimicking human thought processes in software 40 Top-Notch Professionals (All AI Degrees) Exclusively AI Projects - over 600 Clients: NASA, DoD, Commercial Hundreds of FIELDED Systems Variety of AI Techniques Problem-Solvers Tibbetts Award Winner World Class Intelligent Planning (Resource Allocation, Route Planning) page 3
4 Stottler Henke Related Projects Real-Time Aggressive Aircraft Maneuver Planning Aurora General Intelligent Planning and Resource Allocation Framework Numerous NASA and related domains (Shuttle/SLS Processing, Crew, 787 Dreamliner Production, Airborne SIGINT, AFSCN, SSN, missile defense (sensors and interceptors)) UAV ID Scheduling (Aurora) Wild Fire-Fighting Vehicles and Crew (Aurora) SimBionic/Graphical Behavior Transition Networks (BTNs) / High-Speed Intelligent Behaviors Real-time decision-making, Very large # of diverse domains Air Campaign Strategy, Naval Air Warfare Various Case-Based Reasoning Projects (Military Tactics, Enemy Tactical Behavior Explanation) page 4
5 SCOUT Project Objectives Ultimately, allow intelligent UAV team coordination and control Predictable, Robust, 1: Many (vs Many : 1), Contingencies Intelligent real-time planning, role allocation, path planning, adaptive behavior Intelligent UAV team coordination and control framework Explore and Understand SCOUT NASA Applications/Requirements Develop general, powerful, easy-to-apply SCOUT architecture Prototype SCOUT and an application (Search and X) Test prototype on 3 small UAVs (plus several virtual ) Note: Work transitioned from NASA to Air Force page 5
6 SCOUT On- Board Architecture page 6
7 SCOUT Overview 2017 Graphical Behavior Editor Graphical Sketch Editor (Optional) Create Plays (Different Nominals and Contingencies) Both Actions and Cognition (e.g. explicit planning steps) Optional Applicability constraints (for auto-reused plays) High-Level and UAV-Level Contingencies Loss of Engine Power -> Glide to safest landing location Loss of a vehicle -> replan (SAX: re-allocate, Network of sensors:?) Human or SCOUT can select play(s) Case-Based Reasoning (CBR, Applicability Constraints) Aurora to Allocate Roles Probabilistic Road Map Planning for 3-D routes Periodic Re-evaluation, Re-allocation, Re-route-planning page 7
8 SimBionic Experts & Developers Authoring Simulation SimBionic Editor Behavior Library SimBionic Engine Predicate & Action Vocabulary Interface Predicate & Action Code Simulation Engine page 8
9 SCOUT BTN Examples page 9
10 Example BTN: Search and Follow page 10
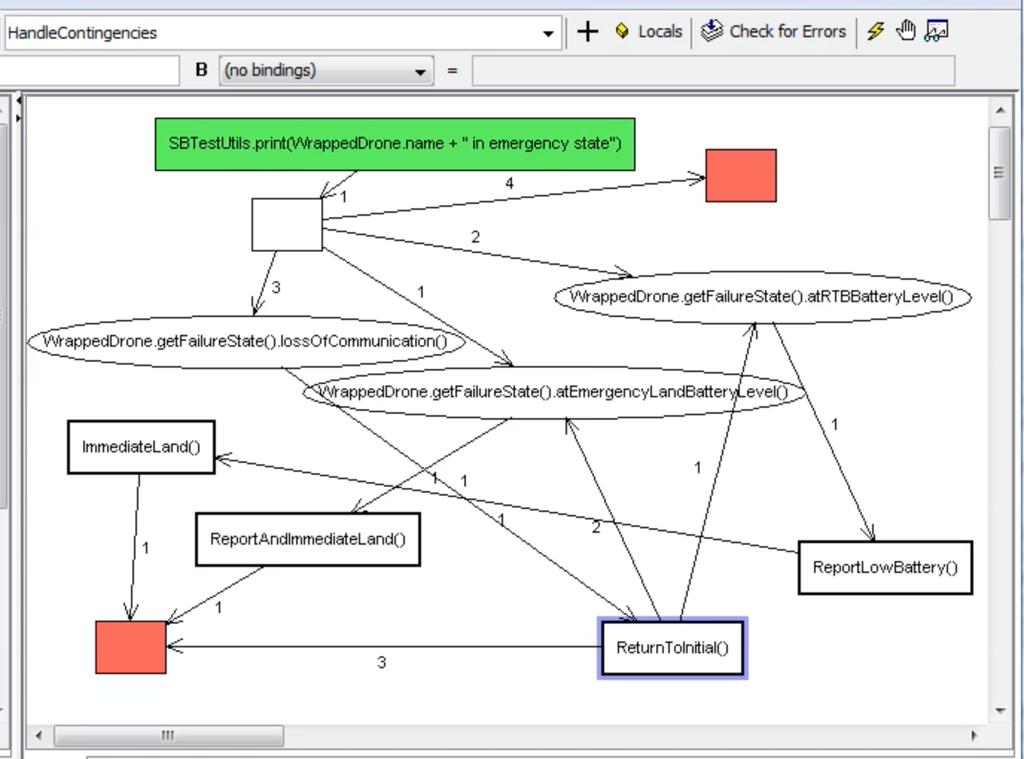
11 Handle Contingencies / Edited page 11

12 SCOUT s Role Allocation Architecture page 12
13 Prototype Domains Search (or Map) and X (when found) Sensor Network Air Force A2AD Multi-UAV SAR/EO/IR/Passive RF Autonomous SEAD page 13
14 Prototyping Activities Initial Testing: 3 UAVs under SimBionic Control, receiving sensor data, feedback loop Simple 3 UAV Search and X (inspect); No effort on smoothing UAV fight control Develop simple NASA World Wind display to view real-time GPS coordinates over planned routes Develop simple simulation in display; simulated UAVs have identical interface to real ones Very useful for safely testing More complex Search (Moving Target), Divvy up Sensor Network / Add Taxiing, Simultaneous Take-offs/Landings, Approvals; No HF/UI Design! page 14
15 Prototype Demo 2017 Multi-UAV SAR Search and X Static and/or Moving Targets Automatic Search Area Allocation / Route Planning Heterogeneous Search Speeds and Swaths Sensor Network / Progression (Approval) 2-D Array in 3-D 3-D Cross Challenges: Noisy Links (both ways), Noisy GPS and Altitude Sensor, Wind/Small, Short Comm Distances, Limited Battery, Noisy + Short Mitigations: Default Behavior; Sanity Checking; Smoothing; Low Maximum Velocity Contingencies Real: Link Loss, Noisy GPS and Altitude Sensor Simulated: Link Loss, Low Battery Levels page 15
16 Prototype Demo Videos Simple Display for Monitoring Simple Simulation with mix of real and simulated UAVs Multi-UAV SAR Search and X (Examine) Sensor Network / Progression (Approval) 3-D Cross 2-D Array in 3-D Taxi to Take-off, Simultaneous Take-off, Execute Flight Card(s), Simultaneous Land, Taxi In, Assignments based on drone constraints Contingencies to Simulated Problems (and edit BTN, replay) Link Loss Bingo Battery Level Emergency Battery Level Edit Contingencies Behavior and Rerun Simple Mixed (Real and Simulated Drones) Scenario page 16
IAAI, July 2014 A Schedule Optimization Tool for Destructive and Non-Destructive Vehicle Tests
 IAAI, July 2014 A Schedule Optimization Tool for Destructive and Non-Destructive Vehicle Tests Jeremy Ludwig, Annaka Kalton, and Robert Richards Stottler Henke Associates, Inc. Brian Bautsch, Craig Markusic,
IAAI, July 2014 A Schedule Optimization Tool for Destructive and Non-Destructive Vehicle Tests Jeremy Ludwig, Annaka Kalton, and Robert Richards Stottler Henke Associates, Inc. Brian Bautsch, Craig Markusic,
Visual Relative Navigation
 Visual Relative Navigation Mr. Scott Wierzbanowski Program Manager, DARPA TTO STTR 18.C Virtual Industry Day Distribution F: Further dissemination only as directed by DARPA/TTO or higher DoD authority
Visual Relative Navigation Mr. Scott Wierzbanowski Program Manager, DARPA TTO STTR 18.C Virtual Industry Day Distribution F: Further dissemination only as directed by DARPA/TTO or higher DoD authority
An Operator Function Taxonomy for Unmanned Aerial Vehicle Missions. Carl E. Nehme Jacob W. Crandall M. L. Cummings
 An Operator Function Taxonomy for Unmanned Aerial Vehicle Missions Carl E. Nehme Jacob W. Crandall M. L. Cummings Motivation UAVs being asked to perform more and more missions Military Commercial Predator
An Operator Function Taxonomy for Unmanned Aerial Vehicle Missions Carl E. Nehme Jacob W. Crandall M. L. Cummings Motivation UAVs being asked to perform more and more missions Military Commercial Predator
A UAV MISSION HIERARCHY C. E. NEHME M.L. CUMMINGS J. W. CRANDALL
 A UAV MISSION HIERARCHY C. E. NEHME M.L. CUMMINGS J. W. CRANDALL MASSACHUSETTS INSTITUTE OF TECHNOLOGY* PREPARED FOR CHARLES RIVER ANALYTICS HAL2006-09 DEC, 2006 \ http://halab.mit.edu e-mail: halab@mit.edu
A UAV MISSION HIERARCHY C. E. NEHME M.L. CUMMINGS J. W. CRANDALL MASSACHUSETTS INSTITUTE OF TECHNOLOGY* PREPARED FOR CHARLES RIVER ANALYTICS HAL2006-09 DEC, 2006 \ http://halab.mit.edu e-mail: halab@mit.edu
Man-Machine Teaming in Autonomous Technologies and Systems
 AUTOMOTIVE INFOCOM TRANSPORT, ENVIRONMENT & POWER ENGINEERING AERONAUTICS SPACE DEFENCE & SECURITY in Autonomous Technologies and Systems Analysis and predication of impact and challenges Prof. Dr. Harald
AUTOMOTIVE INFOCOM TRANSPORT, ENVIRONMENT & POWER ENGINEERING AERONAUTICS SPACE DEFENCE & SECURITY in Autonomous Technologies and Systems Analysis and predication of impact and challenges Prof. Dr. Harald
Autonomous Swarms of High Speed Maneuvering Surface Vessels
 Central T&E Investment Program (CTEIP) Swarm Autonomy Autonomous Swarms of High Speed Maneuvering Surface Vessels Tyler Halpin-Chan 1, Varun Varahamurthy 1, Josh Vanderhook 2 December 12, 2018 1 Naval
Central T&E Investment Program (CTEIP) Swarm Autonomy Autonomous Swarms of High Speed Maneuvering Surface Vessels Tyler Halpin-Chan 1, Varun Varahamurthy 1, Josh Vanderhook 2 December 12, 2018 1 Naval
Joint Unmanned Combat Air System (J-UCAS)
") Approved for Public Release Distribution Unlimited Joint Unmanned Combat Air System (J-UCAS) TO Tactical TTactical Technology Office J-UCAS Demonstrator Goal Demonstrate the technical feasibility for a
Approved for Public Release Distribution Unlimited Joint Unmanned Combat Air System (J-UCAS) TO Tactical TTactical Technology Office J-UCAS Demonstrator Goal Demonstrate the technical feasibility for a
Decision Support for Robotic and Autonomous Systems
 Decision Support for Robotic and Autonomous Systems 1. Introduction The rapid advancement of artificial intelligence, due to great expenditures by commercial firms and military research, brings promise
Decision Support for Robotic and Autonomous Systems 1. Introduction The rapid advancement of artificial intelligence, due to great expenditures by commercial firms and military research, brings promise
Performing UAV Mission Planning, Design, & Optimization
 Performing UAV Mission Planning, Design, & Optimization Russ Magazzu UAV Product Manager Pg 1 of 30 Agenda Unmanned aerial systems application areas capabilities STK 8 Aircraft Mission Modeler Pg 2 of
Performing UAV Mission Planning, Design, & Optimization Russ Magazzu UAV Product Manager Pg 1 of 30 Agenda Unmanned aerial systems application areas capabilities STK 8 Aircraft Mission Modeler Pg 2 of
Custom Small UAV Lab. To: Dr. Lewis Ntaimo ISEN
 Custom Small UAV Lab To: Dr. Lewis Ntaimo ISEN 689-601 From: Gerardo Iglesias, Sugiri Halim, William, Zane Singleton March 20, 2008 I. Statement of Problem Current development and research in the field
Custom Small UAV Lab To: Dr. Lewis Ntaimo ISEN 689-601 From: Gerardo Iglesias, Sugiri Halim, William, Zane Singleton March 20, 2008 I. Statement of Problem Current development and research in the field
Integrating Humans & Autonomy: Achieving Smooth, Simple & Seamless
 Headquarters U.S. Air Force Integrating Humans & Autonomy: Achieving Smooth, Simple & Seamless Dr. Mica Endsley Chief Scientist United States Air Force 3 March 2014 I n t e g r i t y - S e r v i c e -
Headquarters U.S. Air Force Integrating Humans & Autonomy: Achieving Smooth, Simple & Seamless Dr. Mica Endsley Chief Scientist United States Air Force 3 March 2014 I n t e g r i t y - S e r v i c e -
Software Productivity Domains
 Workshop Notes Software Software Application Difficulties Very Easy Risks are well understood with little loss from failure Business or operational logic is straightforward Limited interface to other software
Workshop Notes Software Software Application Difficulties Very Easy Risks are well understood with little loss from failure Business or operational logic is straightforward Limited interface to other software
Click to edit Master title style. Optimal Trajectory Generation for Aerial Towed Cable System Using APMonitor
 Click to edit Master title style Optimal Trajectory Generation for Aerial Towed Cable System Using APMonitor Liang Sun Multiple AGent Intelligent Coordination & Control (MAGICC) Laboratory Department of
Click to edit Master title style Optimal Trajectory Generation for Aerial Towed Cable System Using APMonitor Liang Sun Multiple AGent Intelligent Coordination & Control (MAGICC) Laboratory Department of
Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018
 24/09/2018 Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018 Most of the connectors used in the small, hand-launched military UAVs typical of swarming drones
24/09/2018 Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018 Most of the connectors used in the small, hand-launched military UAVs typical of swarming drones
White Paper. RTOS Considerations for Unmanned Air Vehicles
 RTOS Considerations for Unmanned Air Vehicles Table of Contents 1. Introduction 3 2. UAV History 3 3. UAS - Unmanned Airborne System. 4 4. Certification Authority Outlook 6 5. Multicore Processor Dilemma
RTOS Considerations for Unmanned Air Vehicles Table of Contents 1. Introduction 3 2. UAV History 3 3. UAS - Unmanned Airborne System. 4 4. Certification Authority Outlook 6 5. Multicore Processor Dilemma
RPAS Swarms in Disaster Management Missions
 DLR.de Chart 1 RPAS Swarms in Disaster Management Missions Efficient Deployment through Optimized Mission Planning Julia Zillies, Dagi Geister DLR.de Chart 2 Introduction RPAS Deployment in Disaster Management
DLR.de Chart 1 RPAS Swarms in Disaster Management Missions Efficient Deployment through Optimized Mission Planning Julia Zillies, Dagi Geister DLR.de Chart 2 Introduction RPAS Deployment in Disaster Management
A Comprehensive Architecture for the 21 st Century. Defense Advanced Research Projects Agency
 A Comprehensive Architecture for the 21 st Century Sam B. Wilson, III Defense Advanced Research Projects Agency swilson@darpa.mil (703) 696-2310 DoD Space Architecture Limits Operational System availability
A Comprehensive Architecture for the 21 st Century Sam B. Wilson, III Defense Advanced Research Projects Agency swilson@darpa.mil (703) 696-2310 DoD Space Architecture Limits Operational System availability
MESMER Counter Drone Solution
 MESMER Counter Drone Solution May 2017 Exclusive Distributor for Latin America Introduction Department 13 is rapidly growing technology company focused on transformative communications and networking technology.
MESMER Counter Drone Solution May 2017 Exclusive Distributor for Latin America Introduction Department 13 is rapidly growing technology company focused on transformative communications and networking technology.
Self-Awareness for Vehicle Safety and Mission Success
 Self-Awareness for Vehicle Safety and Mission Success Jerry Franke, Senior Member, Engineering Staff Brian Satterfield, Member, Engineering Staff Michael Czajkowski, Member, Engineering Staff Steve Jameson,
Self-Awareness for Vehicle Safety and Mission Success Jerry Franke, Senior Member, Engineering Staff Brian Satterfield, Member, Engineering Staff Michael Czajkowski, Member, Engineering Staff Steve Jameson,
SOFTWARE DEFINED RADIO APPLIED TO MISSION ORIENTED SENSORS ARRAY
 WInnComm-Europe 2017 2017 Wireless Innovation Forum European Conference on Communications Technologies and Software Defined Radios SOFTWARE DEFINED RADIO APPLIED TO MISSION ORIENTED SENSORS ARRAY A PROPOSAL
WInnComm-Europe 2017 2017 Wireless Innovation Forum European Conference on Communications Technologies and Software Defined Radios SOFTWARE DEFINED RADIO APPLIED TO MISSION ORIENTED SENSORS ARRAY A PROPOSAL
Tactical mission system for Integration and Management of Maritime Patrol Aircraft sensor, weapon and communication sub-systems
 Tactical mission system for Integration and Management of Maritime Patrol Aircraft sensor, weapon and communication sub-systems Maritime Mission Integration & Management System M 2 IMS is a tactical mission
Tactical mission system for Integration and Management of Maritime Patrol Aircraft sensor, weapon and communication sub-systems Maritime Mission Integration & Management System M 2 IMS is a tactical mission
Development, Validation and Implementation Considerations of a Decision Support System for Unmanned & Autonomous System of Systems Test & Evaluation
 Development, Validation and Implementation Considerations of a Decision Support System for Unmanned & Autonomous System of Systems Test & Evaluation Test Week 2010 Kris Cowart, Maj, USAF Ricardo Valerdi,
Development, Validation and Implementation Considerations of a Decision Support System for Unmanned & Autonomous System of Systems Test & Evaluation Test Week 2010 Kris Cowart, Maj, USAF Ricardo Valerdi,
SOLUTION MOTION VIDEO EXPLOITATION
 SOLUTION MOTION VIDEO EXPLOITATION SITUATIONAL AWARENESS IN A DYNAMIC ENVIRONMENT Conditions on the ground can change in an instant, and national security depends on up-to-the minute situational awareness.
SOLUTION MOTION VIDEO EXPLOITATION SITUATIONAL AWARENESS IN A DYNAMIC ENVIRONMENT Conditions on the ground can change in an instant, and national security depends on up-to-the minute situational awareness.
MultiUAV: A MULTIPLE UAV SIMULATION FOR INVESTIGATION OF COOPERATIVE CONTROL
 Proceedings of the 2002 Winter Simulation Conference E. Yücesan, C.-H. Chen, J. L. Snowdon, and J. M. Charnes, eds. MultiUAV: A MULTIPLE UAV SIMULATION FOR INVESTIGATION OF COOPERATIVE CONTROL S. J. Rasmussen
Proceedings of the 2002 Winter Simulation Conference E. Yücesan, C.-H. Chen, J. L. Snowdon, and J. M. Charnes, eds. MultiUAV: A MULTIPLE UAV SIMULATION FOR INVESTIGATION OF COOPERATIVE CONTROL S. J. Rasmussen
Supply Chain Transformation Through AIT Convergent Technologies
 Supply Chain Transformation Through AIT Convergent Technologies Dr. Kenneth A. Gabriel Senior Research Scholar And Director, Center for Integrated Security Logistics University of Maryland College Park,
Supply Chain Transformation Through AIT Convergent Technologies Dr. Kenneth A. Gabriel Senior Research Scholar And Director, Center for Integrated Security Logistics University of Maryland College Park,
Delegation Approaches to Multiple Unmanned Vehicle Control
 CERI Human Factors of UAVs Workshop May 24-25, 2004 Chandler, AZ Delegation Approaches to Multiple Unmanned Vehicle Control Christopher A. Miller, Robert P. Goldman, Harry B. Funk Core Challenges of Multi-UAV
CERI Human Factors of UAVs Workshop May 24-25, 2004 Chandler, AZ Delegation Approaches to Multiple Unmanned Vehicle Control Christopher A. Miller, Robert P. Goldman, Harry B. Funk Core Challenges of Multi-UAV
Formal Methods in Resilient Systems Design using a Flexible Contract Approach
 Formal Methods in Resilient Systems Design using a Flexible Contract Approach Sponsor: DASD(SE) By Dr. Azad M. Madni 9 th Annual SERC Sponsor Research Review November 8, 2017 FHI 360 CONFERENCE CENTER
Formal Methods in Resilient Systems Design using a Flexible Contract Approach Sponsor: DASD(SE) By Dr. Azad M. Madni 9 th Annual SERC Sponsor Research Review November 8, 2017 FHI 360 CONFERENCE CENTER
Task Force on the Role of Autonomy in the DoD Systems
 Task Force on the Role of Autonomy in the DoD Systems Dr. Robin Murphy, Co-Chair Mr. James Shields, Co-Chair June 2012 Terms of Reference Review relevant technologies to evaluate readiness for introduction
Task Force on the Role of Autonomy in the DoD Systems Dr. Robin Murphy, Co-Chair Mr. James Shields, Co-Chair June 2012 Terms of Reference Review relevant technologies to evaluate readiness for introduction
A Shift in Automation Philosophy: From Manned to Unmanned
 A Shift in Automation Philosophy: From Manned to Unmanned Jay Shively Human Systems Integration Group Lead Aviation and Missile Research, Development, and Engineering Center Army/NASA Rotorcraft Division
A Shift in Automation Philosophy: From Manned to Unmanned Jay Shively Human Systems Integration Group Lead Aviation and Missile Research, Development, and Engineering Center Army/NASA Rotorcraft Division
TEST I VIDAREUTVECKLINGEN AV GRIPENS AVIONIK- OCH MARKSTÖDSYSTEM
 TEST I VIDAREUTVECKLINGEN AV GRIPENS AVIONIK- OCH MARKSTÖDSYSTEM Håkan Anderwall, Saab AB Jacob Gustafsson, Combitech 2011-11-17 AGENDA! The Gripen weapon system an overview! Part 1: The Gripen Aircraft
TEST I VIDAREUTVECKLINGEN AV GRIPENS AVIONIK- OCH MARKSTÖDSYSTEM Håkan Anderwall, Saab AB Jacob Gustafsson, Combitech 2011-11-17 AGENDA! The Gripen weapon system an overview! Part 1: The Gripen Aircraft
AFRL-VA-WP-TP
 AFRL-VA-WP-TP-2003-339 DEVELOPMENT AND TESTING OF A NETWORK-CENTRIC, MULTI-UAV COMMAND AND CONTROL SCHEME USING A VARIABLE AUTONOMY CONTROL SYSTEM (VACS) Luis A. Piñeiro Dave Duggan OCTOBER 2003 Approved
AFRL-VA-WP-TP-2003-339 DEVELOPMENT AND TESTING OF A NETWORK-CENTRIC, MULTI-UAV COMMAND AND CONTROL SCHEME USING A VARIABLE AUTONOMY CONTROL SYSTEM (VACS) Luis A. Piñeiro Dave Duggan OCTOBER 2003 Approved
Open Systems: State of the Practice
 : State of the Practice for NDIA Simulation-Based Acquisition/Advanced Systems Engineering Environment Conference 25 June 2002 Overview Vision and End State Transformation Characteristics/Indicators Implementation
: State of the Practice for NDIA Simulation-Based Acquisition/Advanced Systems Engineering Environment Conference 25 June 2002 Overview Vision and End State Transformation Characteristics/Indicators Implementation
AeroVironment, Inc. Unmanned Aircraft Systems Overview. Background
 AeroVironment, Inc. Unmanned Aircraft Systems Overview Background AeroVironment provides customers with more actionable intelligence so they can proceed with certainty. Based in California, AeroVironment
AeroVironment, Inc. Unmanned Aircraft Systems Overview Background AeroVironment provides customers with more actionable intelligence so they can proceed with certainty. Based in California, AeroVironment
AEM 5495 Spring Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs)
") AEM 5495 Spring 2011 Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs) Gary J. Balas balas@umn.edu Monday-Wednesday 3:35-4:50 PM 211 Akerman Hall UAV Course Syllabus
AEM 5495 Spring 2011 Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs) Gary J. Balas balas@umn.edu Monday-Wednesday 3:35-4:50 PM 211 Akerman Hall UAV Course Syllabus
Virtual Ship. Aldo Zini. Ambiente integrato ed interoperabile per la simulazione navale. Cetena S.p.A.
 Virtual Ship Ambiente integrato ed interoperabile per la simulazione navale Aldo Zini Cetena S.p.A. Simulation in Ship Design Why using simulation in Ship Design Hydrodynamics Sea Trials Information Technology
Virtual Ship Ambiente integrato ed interoperabile per la simulazione navale Aldo Zini Cetena S.p.A. Simulation in Ship Design Why using simulation in Ship Design Hydrodynamics Sea Trials Information Technology
Utilizing The Capabilities Knowledge Base for Cost Benefit Analysis and Analysis of Alternatives
 Utilizing The Capabilities Knowledge Base for Cost Benefit Analysis and Analysis of Alternatives Chadd Sibert Office of the Deputy Assistant Secretary of the Army for Cost and Economics (ODASA-CE) chadd.edward.sibert@us.army.mil
Utilizing The Capabilities Knowledge Base for Cost Benefit Analysis and Analysis of Alternatives Chadd Sibert Office of the Deputy Assistant Secretary of the Army for Cost and Economics (ODASA-CE) chadd.edward.sibert@us.army.mil
Multi-Disciplinary Basic Research in the Science of Autonomy with Naval Relevance BAA QUESTIONS & ANSWERS As of 18 November 2008
 Multi-Disciplinary Basic Research in the Science of Autonomy with Naval Relevance BAA 09-008 QUESTIONS & ANSWERS 19 53 As of 18 November 2008 Q 19: From the Q&A it seems to be that industry CANNOT be the
Multi-Disciplinary Basic Research in the Science of Autonomy with Naval Relevance BAA 09-008 QUESTIONS & ANSWERS 19 53 As of 18 November 2008 Q 19: From the Q&A it seems to be that industry CANNOT be the
NM Ops and technical evolutions
 NM Ops and technical evolutions Juan Rodriguez Poveda Network Operations Idalina Mendes Videira Network Strategy 27/01/2016 NM User Forum 2016 -Network Evolutions in 2016 1 Overview of NM Evolutions NM
NM Ops and technical evolutions Juan Rodriguez Poveda Network Operations Idalina Mendes Videira Network Strategy 27/01/2016 NM User Forum 2016 -Network Evolutions in 2016 1 Overview of NM Evolutions NM
A Sea Change in technology creates new challenge's to test programs
 Presenter: W. Skip Parish / Director *UATGlobal TARGETS,UAS & RANGE OPERATIONS SYMPOSIUM AND EXHIBITION - THE FUTURE OF TESTING AND TRAINING. > Orlando Fla Conf. 2012 A Sea Change in technology creates
Presenter: W. Skip Parish / Director *UATGlobal TARGETS,UAS & RANGE OPERATIONS SYMPOSIUM AND EXHIBITION - THE FUTURE OF TESTING AND TRAINING. > Orlando Fla Conf. 2012 A Sea Change in technology creates
APPLICATIONS OF ADDITIVE MANUFACTURING IN MILITARY SIMULATORS & TRAINERS
 APPLICATIONS OF ADDITIVE MANUFACTURING IN MILITARY SIMULATORS & TRAINERS SME SMART MANUFACTURING SEMINAR AUGUST 9, 2018 KNOXVILLE, TN Robert Ghobrial LM Technical Fellow Production Operations Rotary &
APPLICATIONS OF ADDITIVE MANUFACTURING IN MILITARY SIMULATORS & TRAINERS SME SMART MANUFACTURING SEMINAR AUGUST 9, 2018 KNOXVILLE, TN Robert Ghobrial LM Technical Fellow Production Operations Rotary &
Design and implantation of a search and find application on a heterogeneous robotic platform
 Design and implantation of a search and find application on a heterogeneous robotic platform Ahmed Barnawi, Abdullah Al-Barakati Faculty of Computing and IT, King Abdulaziz University, Jeddah, Saudi Arabia
Design and implantation of a search and find application on a heterogeneous robotic platform Ahmed Barnawi, Abdullah Al-Barakati Faculty of Computing and IT, King Abdulaziz University, Jeddah, Saudi Arabia
Safety Related Considerations in Autonomy
 Safety Related Considerations in Autonomy Dr. Guillaume Brat Intelligent Systems Division NASA Ames Research Center NASA ARMD Airspace Operations and Safety Program Presented at the OPTICS Workshop: FROM
Safety Related Considerations in Autonomy Dr. Guillaume Brat Intelligent Systems Division NASA Ames Research Center NASA ARMD Airspace Operations and Safety Program Presented at the OPTICS Workshop: FROM
UAVs as Tactical Wingmen: Control Methods and Pilots Perceptions
 UAVs as Tactical Wingmen: Control Methods and Pilots Perceptions D. Morales, 2nd Lt, USAF M.L. Cummings, PhD Aeronautics and Astronautics Massachusetts Institute of Technology Cambridge, MA 02139 Introduction
UAVs as Tactical Wingmen: Control Methods and Pilots Perceptions D. Morales, 2nd Lt, USAF M.L. Cummings, PhD Aeronautics and Astronautics Massachusetts Institute of Technology Cambridge, MA 02139 Introduction
S.T.E.M. Integrated Robotics Detailed Outline
 S.T.E.M. Integrated Robotics Detailed Outline Unit 1: An Introduction to Drones Time: 4 Days Lesson 1.1 Introduction to MINDS-i 1. A brief intro of how MINDS-i defines STEM education and STEM Integrated
S.T.E.M. Integrated Robotics Detailed Outline Unit 1: An Introduction to Drones Time: 4 Days Lesson 1.1 Introduction to MINDS-i 1. A brief intro of how MINDS-i defines STEM education and STEM Integrated
Swarm Intelligence: a New C2 Paradigm with an Application to the Control of Swarms of UAVs
 Swarm Intelligence: a New C2 Paradigm with an Application to the Control of Swarms of UAVs Paolo Gaudiano Benjamin Shargel Eric Bonabeau Icosystem Corporation Cambridge, MA Bruce T. Clough AFRL Control
Swarm Intelligence: a New C2 Paradigm with an Application to the Control of Swarms of UAVs Paolo Gaudiano Benjamin Shargel Eric Bonabeau Icosystem Corporation Cambridge, MA Bruce T. Clough AFRL Control
Persistent Surveillance & Border Security (An Automated Means of Aircraft Deconfliction)
") ECONOMICALLY DISADVANTAGED, WOMAN-OWNED SMALL BUSINESS (ED-WOSB) SBA CERTIFIED 8(M), HUB-ZONE & VIRGINIA CERTIFIED SWAM Decision Support for Persistent Surveillance & Border Security (An Automated Means
ECONOMICALLY DISADVANTAGED, WOMAN-OWNED SMALL BUSINESS (ED-WOSB) SBA CERTIFIED 8(M), HUB-ZONE & VIRGINIA CERTIFIED SWAM Decision Support for Persistent Surveillance & Border Security (An Automated Means
Using System Theoretic Process Analysis (STPA) for a Safety Trade Study
 for a Safety Trade Study") Using System Theoretic Process Analysis (STPA) for a Safety Trade Study David Horney MIT/U.S. Air Force Distribution Statement A: Approved for public release; distribution unlimited Safety-Guided Design
Using System Theoretic Process Analysis (STPA) for a Safety Trade Study David Horney MIT/U.S. Air Force Distribution Statement A: Approved for public release; distribution unlimited Safety-Guided Design
A User s Experience with Model-Based Design for GNC-Based Systems
 A User s Experience with Model-Based Design for GNC-Based Systems James E. Craft, Lockheed-Martin Missiles and Fire Control 1 Lockheed Martin Corporation 140,000 Employees 65,000 Scientists and Engineers
A User s Experience with Model-Based Design for GNC-Based Systems James E. Craft, Lockheed-Martin Missiles and Fire Control 1 Lockheed Martin Corporation 140,000 Employees 65,000 Scientists and Engineers
WIND RIVER SIMICS WHEN IT MATTERS, IT RUNS ON WIND RIVER DEVELOP SOFTWARE IN A VIRTUAL ENVIRONMENT
 AN INTEL COMPANY WIND RIVER SIMICS Electronic systems are becoming increasingly complex, with more hardware, more software, and more connectivity. Current systems are software intensive, often containing
AN INTEL COMPANY WIND RIVER SIMICS Electronic systems are becoming increasingly complex, with more hardware, more software, and more connectivity. Current systems are software intensive, often containing
INTELLIGENT MULTI-UNMANNED VEHICLE PLANNER WITH ADAPTIVE COLLABORATIVE/CONTROL TECHNOLOGIES (IMPACT)
") INTELLIGENT MULTI-UNMANNED VEHICLE PLANNER WITH ADAPTIVE COLLABORATIVE/CONTROL TECHNOLOGIES (IMPACT) Mark Draper, Gloria Calhoun, Michael Hansen, Scott Douglass Sarah Spriggs, Michael Patzek, Allen Rowe
INTELLIGENT MULTI-UNMANNED VEHICLE PLANNER WITH ADAPTIVE COLLABORATIVE/CONTROL TECHNOLOGIES (IMPACT) Mark Draper, Gloria Calhoun, Michael Hansen, Scott Douglass Sarah Spriggs, Michael Patzek, Allen Rowe
Tactical Technology Office
 Tactical Technology Office Pamela A. Melroy, Deputy Director Briefing prepared for the Aeronautics and Space Engineering Board (ASEB) April 2, 2014 Mission The Defense Advanced Research Projects Agency
Tactical Technology Office Pamela A. Melroy, Deputy Director Briefing prepared for the Aeronautics and Space Engineering Board (ASEB) April 2, 2014 Mission The Defense Advanced Research Projects Agency
Multi-INT Simulation for the Hybrid Threat
 Multi-INT Simulation for the Hybrid Threat Steven Webster KINEX, INC. James L. Bowman III Software Engineering Directorate, Joint Technology Center / System Integration Laboratory Kirby Thomas Headquarters
Multi-INT Simulation for the Hybrid Threat Steven Webster KINEX, INC. James L. Bowman III Software Engineering Directorate, Joint Technology Center / System Integration Laboratory Kirby Thomas Headquarters
Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage
 The 2008 ICRA Workshop on Cooperative Control of Multiple Heterogeneous UAVs for Coverage and Surveillance Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage Peng Cheng Jim Keller Vijay
The 2008 ICRA Workshop on Cooperative Control of Multiple Heterogeneous UAVs for Coverage and Surveillance Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage Peng Cheng Jim Keller Vijay
The SWRLing Future of OWL. Mark Greaves DARPA / IXO
 The SWRLing Future of OWL Mark Greaves DARPA / IXO In the Beginning DARPA Agent Mark Up Language (DAML) PE/Project Number: 62301E/ST-11 PAD ID NUMBER: 010033 PGM NUMBER: XAM8E DIRO APPROVAL: PGM MANAGER:
The SWRLing Future of OWL Mark Greaves DARPA / IXO In the Beginning DARPA Agent Mark Up Language (DAML) PE/Project Number: 62301E/ST-11 PAD ID NUMBER: 010033 PGM NUMBER: XAM8E DIRO APPROVAL: PGM MANAGER:
EUROPA Knowledge Engineering Tools
 EUROPA Knowledge Engineering Tools JAVIER BARREIRO, MATTHEW BOYCE, MINH DO, JEREMY FRANK, MICHAEL IATAURO TATIANA KICHKAYLO, PAUL MORRIS, JAMES ONG +, EMILIO REMOLINA +, TRISTAN SMITH, DAVID SMITH Lots
EUROPA Knowledge Engineering Tools JAVIER BARREIRO, MATTHEW BOYCE, MINH DO, JEREMY FRANK, MICHAEL IATAURO TATIANA KICHKAYLO, PAUL MORRIS, JAMES ONG +, EMILIO REMOLINA +, TRISTAN SMITH, DAVID SMITH Lots
AIRBORNE BATTLE MANAGEMENT SYSTEM & AUTONOMOUS OPERATIONS UAV AUTONOMY MMIs
 AIRBORNE BATTLE MANAGEMENT SYSTEM & AUTONOMOUS OPERATIONS UAV AUTONOMY MMIs Dr. Gerald S. Mersten NA VAIR Patuxent River, MD Abstract Both the Airborne Battle Management System (ABMs) Program and the Autonomous
AIRBORNE BATTLE MANAGEMENT SYSTEM & AUTONOMOUS OPERATIONS UAV AUTONOMY MMIs Dr. Gerald S. Mersten NA VAIR Patuxent River, MD Abstract Both the Airborne Battle Management System (ABMs) Program and the Autonomous
Project Readiness Package Rev 7/22/11
 INTRODUCTION: ADMINISTRATIVE INFORMATION: Project Name (tentative): Quadcopter Navigation System Project Number, if known: R14902 Preferred Start/End Semester in Senior Design: Fall/Spring Spring/Fall
INTRODUCTION: ADMINISTRATIVE INFORMATION: Project Name (tentative): Quadcopter Navigation System Project Number, if known: R14902 Preferred Start/End Semester in Senior Design: Fall/Spring Spring/Fall
Collaborative Control of Unmanned Air Vehicles Concentration
 Collaborative Control of Unmanned Air Vehicles Concentration Stochastic Dynamic Programming and Operator Models for UAV Operations Anouck Girard August 29, 2007 Overview of C 2 UAV Concentration Team:
Collaborative Control of Unmanned Air Vehicles Concentration Stochastic Dynamic Programming and Operator Models for UAV Operations Anouck Girard August 29, 2007 Overview of C 2 UAV Concentration Team:
Running Trains with JMRI s Dispatcher
 Running Trains with JMRI s Dispatcher Dave Duchamp Dick Bronson (Co- Presenter) Bob Jacobsen (Co- Presenter) What is Dispatcher? Dispatcher provides functionality and organizes information for dispatching
Running Trains with JMRI s Dispatcher Dave Duchamp Dick Bronson (Co- Presenter) Bob Jacobsen (Co- Presenter) What is Dispatcher? Dispatcher provides functionality and organizes information for dispatching
Center for Innovative Technology (CIT) In conjunction with our partners Smart City Works, LLC and TechNexus (the SCITI Program)
 In conjunction with our partners Smart City Works, LLC and TechNexus (the SCITI Program)") Center for Innovative Technology (CIT) In conjunction with our partners Smart City Works, LLC and TechNexus (the SCITI Program) Requests Innovators with capabilities in the following area Technical Specification:
Center for Innovative Technology (CIT) In conjunction with our partners Smart City Works, LLC and TechNexus (the SCITI Program) Requests Innovators with capabilities in the following area Technical Specification:
A Real-Time Community-of-Interest (COI) Framework for Command-and- Control Applications
 Framework for Command-and- Control Applications") A Real-Time Community-of-Interest (COI) Framework for Command-and- Control Applications Ray Paul Department of Defense Washington, DC raymond.paul@osd.mil 5/22/2004 1 Agenda Requirements of COIs COI architecture
A Real-Time Community-of-Interest (COI) Framework for Command-and- Control Applications Ray Paul Department of Defense Washington, DC raymond.paul@osd.mil 5/22/2004 1 Agenda Requirements of COIs COI architecture
Co-operating Miniature UAVs for Surveillance and Reconnaissance
 Co-operating Miniature UAVs for Surveillance and Reconnaissance Axel Bürkle 1, Sandro Leuchter 1 1 Fraunhofer Institute for Information and Data Processing IITB Fraunhoferstraße 1, 76131 Karlsruhe Abstract.
Co-operating Miniature UAVs for Surveillance and Reconnaissance Axel Bürkle 1, Sandro Leuchter 1 1 Fraunhofer Institute for Information and Data Processing IITB Fraunhoferstraße 1, 76131 Karlsruhe Abstract.
10 th International Command and Control Research and Technology Symposium The Future of C2
 10 th International Command and Control Research and Technology Symposium The Future of C2 Moving Emergent Behavior Algorithms from Simulation to Hardware: Command and Control of Autonomous UxV s Chad
10 th International Command and Control Research and Technology Symposium The Future of C2 Moving Emergent Behavior Algorithms from Simulation to Hardware: Command and Control of Autonomous UxV s Chad
An Adaptive Automation Approach for UAV UI Concept Development
 An Adaptive Automation Approach for UAV UI Concept Development filename -1 Jeff O Hara, Senior Research Scientist Stuart Michelson, Research Engineer II Georgia Tech Research Institute, Human Systems Engineering
An Adaptive Automation Approach for UAV UI Concept Development filename -1 Jeff O Hara, Senior Research Scientist Stuart Michelson, Research Engineer II Georgia Tech Research Institute, Human Systems Engineering
C2 ADVANCED MULTI-DOMAIN ENVIRONMENT AND LIVE OBSERVATION TECHNOLOGIES
 C2 ADVANCED MULTI-DOMAIN ENVIRONMENT AND LIVE OBSERVATION TECHNOLOGIES FLYSEC Final Info Day and Risk-Based Security Projects Cluster meeting 28/06/2018 1 OVERVIEW 2 Source: FRONTEX THE PROBLEM IRREGULAR
C2 ADVANCED MULTI-DOMAIN ENVIRONMENT AND LIVE OBSERVATION TECHNOLOGIES FLYSEC Final Info Day and Risk-Based Security Projects Cluster meeting 28/06/2018 1 OVERVIEW 2 Source: FRONTEX THE PROBLEM IRREGULAR
WELCOME TO THE DRONE AGE. Karen Risa Robbins Washington Progress Group September 22, 2015
 WELCOME TO THE DRONE AGE Karen Risa Robbins Washington Progress Group September 22, 2015 WHERE ARE WE GOING WITH THEM HOW SOON WILL WE GET THERE ALL GOOD OR NOT POSSIBILITIES RUN WILD SERIOUSLY, BIG EXPECTATIONS
WELCOME TO THE DRONE AGE Karen Risa Robbins Washington Progress Group September 22, 2015 WHERE ARE WE GOING WITH THEM HOW SOON WILL WE GET THERE ALL GOOD OR NOT POSSIBILITIES RUN WILD SERIOUSLY, BIG EXPECTATIONS
The Top Emerging Technologies For B2C Marketers
 The Top Emerging Technologies For B2C Marketers New technologies are always emerging in response to customers demands and marketers needs. To help you focus your long-term tech investment strategies, we
The Top Emerging Technologies For B2C Marketers New technologies are always emerging in response to customers demands and marketers needs. To help you focus your long-term tech investment strategies, we
Modeling and Control of Small and Mini Rotorcraft UAVs
 Contents 1 Introduction... 1 1.1 What are Unmanned Aerial Vehicles (UAVs) and Micro Aerial Vehicles (MAVs)?... 2 1.2 Unmanned Aerial Vehicles and Micro Aerial Vehicles: Definitions, History,Classification,
Contents 1 Introduction... 1 1.1 What are Unmanned Aerial Vehicles (UAVs) and Micro Aerial Vehicles (MAVs)?... 2 1.2 Unmanned Aerial Vehicles and Micro Aerial Vehicles: Definitions, History,Classification,
APP OPERATION GUIDE ios
 6 1. DOWNLOAD APP APP OPERATION GUIDE ios Android APP on Google play Scan the QR code, connect to the App Store or Google Play and download the Ophelia GPS application for free. 2. CONNECT Wi-Fi NETWORKS
6 1. DOWNLOAD APP APP OPERATION GUIDE ios Android APP on Google play Scan the QR code, connect to the App Store or Google Play and download the Ophelia GPS application for free. 2. CONNECT Wi-Fi NETWORKS
Decision Support for Time Critical Strike: Land Based Target Area Of Uncertainty (LBTAOU) Prototype
 Prototype") Decision Support for Time Critical Strike: Land Based Target Area Of Uncertainty (LBTAOU) Prototype David Silvia Naval Undersea Warfare Center Newport, RI 10/18/2005 1 Partnership Research and development
Decision Support for Time Critical Strike: Land Based Target Area Of Uncertainty (LBTAOU) Prototype David Silvia Naval Undersea Warfare Center Newport, RI 10/18/2005 1 Partnership Research and development
Model-Driven Development of Integrated Support Architectures
 Model-Driven Development of Integrated Support Architectures Stan Ofsthun Associate Technical Fellow The Boeing Company (314) 233-2300 October 13, 2004 Agenda Introduction Health Management Framework rocess
Model-Driven Development of Integrated Support Architectures Stan Ofsthun Associate Technical Fellow The Boeing Company (314) 233-2300 October 13, 2004 Agenda Introduction Health Management Framework rocess
Tutorials and Labs. Day 3: Activity Planning. Day 4: Perception and Manipulation. Day 5: Planning with Uncertainty and Risk
 Lab 3: Modeling Tutorials and Labs Day 1: Robust Execution Introduction 1: Architectures for Autonomy Tutorial 2: Self-Monitoring, Self-Diagnosing Systems Tutorial 3: Temporal Networks for Dynamic Scheduling
Lab 3: Modeling Tutorials and Labs Day 1: Robust Execution Introduction 1: Architectures for Autonomy Tutorial 2: Self-Monitoring, Self-Diagnosing Systems Tutorial 3: Temporal Networks for Dynamic Scheduling
The Future of C4ISR. Dr. Paul Zablocky CERDEC, Space & Terrestrial Communications Directorate Director (SES) 09 Apr 2014
 09 Apr 2014") DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. The Future of C4ISR 09 Apr 2014 Dr. Paul Zablocky CERDEC, Space & Terrestrial Communications Directorate Director (SES)
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. The Future of C4ISR 09 Apr 2014 Dr. Paul Zablocky CERDEC, Space & Terrestrial Communications Directorate Director (SES)
TrueView Comes to AdWords. August 2017
 TrueView Comes to AdWords August 2017 Section 1: Creating your TrueView campaign in AdWords TrueView is now fully integrated into the core AdWords interface! As we welcome TrueView into AdWords, we re
TrueView Comes to AdWords August 2017 Section 1: Creating your TrueView campaign in AdWords TrueView is now fully integrated into the core AdWords interface! As we welcome TrueView into AdWords, we re
Request for Solutions: Air Defense Artillery Long-Term Evolution Orientation Device Amendment 1 April 12 th, 2018
 1. Purpose Request for Solutions: Air Defense Artillery Long-Term Evolution Orientation Device Amendment 1 April 12 th, 2018 This Request for Solutions is issued to identify a unique solution for an Air
1. Purpose Request for Solutions: Air Defense Artillery Long-Term Evolution Orientation Device Amendment 1 April 12 th, 2018 This Request for Solutions is issued to identify a unique solution for an Air
Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition
 Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition Feng Guo No.1 Harbin Engineering University, China Peiji Wang No.2 Yuan Yin No.3 Xiaoyan Zheng No.4
Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition Feng Guo No.1 Harbin Engineering University, China Peiji Wang No.2 Yuan Yin No.3 Xiaoyan Zheng No.4
Andrew Macdonald ILOG Technical Professional 2010 IBM Corporation
 The value of IBM WebSphere ILOG BRMS Understanding the value of IBM WebSphere ILOG Business Rule Management Systems (BRMS). BRMS can be used to implement and manage change in a safe and predictable way
The value of IBM WebSphere ILOG BRMS Understanding the value of IBM WebSphere ILOG Business Rule Management Systems (BRMS). BRMS can be used to implement and manage change in a safe and predictable way
Contact Program Coordinator NMMT Working Group Holger Klindt
 emir is an open initiative of the German maritime industry for improving safety and efficiency in maritime transportation systems. emir provides a framework for engineering, validation, verification, and
emir is an open initiative of the German maritime industry for improving safety and efficiency in maritime transportation systems. emir provides a framework for engineering, validation, verification, and
Final Project Report. Abstract. Document information
 Final Project Report Document information Project Title Airborne Full 4D Trajectory Management Project Number 9.02 Project Manager Marianne MOLLER Deliverable Name Final Project Report Deliverable ID D07
Final Project Report Document information Project Title Airborne Full 4D Trajectory Management Project Number 9.02 Project Manager Marianne MOLLER Deliverable Name Final Project Report Deliverable ID D07
Minisimising Noise at Airports P st October 2015
 Minisimising Noise at Airports P06.08.08 21st October 2015 Summary Project Overview and Scope Concepts of Operations Increased glide slope Adaptive Increased Glide Slope Double Slope Approach Multiple
Minisimising Noise at Airports P06.08.08 21st October 2015 Summary Project Overview and Scope Concepts of Operations Increased glide slope Adaptive Increased Glide Slope Double Slope Approach Multiple
Multi Drone Task Allocation (Target Search)
") UNIVERSITY of the WESTERN CAPE Multi Drone Task Allocation (Target Search) Author: Freedwell Shingange Supervisor: Prof Antoine Bagula Co-Supervisor: Mr Mehrdad Ghaziasgar March 27, 2015 Abstract The goal
UNIVERSITY of the WESTERN CAPE Multi Drone Task Allocation (Target Search) Author: Freedwell Shingange Supervisor: Prof Antoine Bagula Co-Supervisor: Mr Mehrdad Ghaziasgar March 27, 2015 Abstract The goal
NASA Aeronautics Strategic Thrust: Assured Autonomy for Aviation Transformation Vision and Roadmap
 National Aeronautics and Space Administration NASA Aeronautics Strategic Thrust: Assured Autonomy for Aviation Transformation Vision and Roadmap Sharon Graves March 9, 2016 1 2 Why an Aviation Autonomy
National Aeronautics and Space Administration NASA Aeronautics Strategic Thrust: Assured Autonomy for Aviation Transformation Vision and Roadmap Sharon Graves March 9, 2016 1 2 Why an Aviation Autonomy
Presentation Outline
 UAV Operator Interface Research at AFRL/HEC May 24, 2004 Mark H. Draper, Ph.D. AFRL/HECI Mark.Draper@wpafb.af.mil Presentation Outline Problem/Context AFRL/HEC Overview Advanced Controls and Displays for
UAV Operator Interface Research at AFRL/HEC May 24, 2004 Mark H. Draper, Ph.D. AFRL/HECI Mark.Draper@wpafb.af.mil Presentation Outline Problem/Context AFRL/HEC Overview Advanced Controls and Displays for
SELF AWARE VEHICLES FOR URBAN AIR MOBILITY: CHALLENGES AND OPPORTUNITIES
 SELF AWARE VEHICLES FOR URBAN AIR MOBILITY: CHALLENGES AND OPPORTUNITIES Irene M. Gregory, Ph.D., S.T. NASA Senior Technologist for Advanced Control Theory and Applications 2017 AFOSR Dynamics and Control
SELF AWARE VEHICLES FOR URBAN AIR MOBILITY: CHALLENGES AND OPPORTUNITIES Irene M. Gregory, Ph.D., S.T. NASA Senior Technologist for Advanced Control Theory and Applications 2017 AFOSR Dynamics and Control
Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions
 Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions Allison Ryan July 22, 2004 The AINS Center for the Collaborative Control of Unmanned Vehicles 1 US Coast Guard Search and Rescue
Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions Allison Ryan July 22, 2004 The AINS Center for the Collaborative Control of Unmanned Vehicles 1 US Coast Guard Search and Rescue
Test & Evaluation/Science & Technology Program
 Test & Evaluation/Science & Technology Program C4I & Software Intensive Systems Test (C4T) Test Technology Area (TTA) Big Data Analytic Technology Needs for T&E May 11, 2017 Approved for public release:
Test & Evaluation/Science & Technology Program C4I & Software Intensive Systems Test (C4T) Test Technology Area (TTA) Big Data Analytic Technology Needs for T&E May 11, 2017 Approved for public release:
Enabling Software Assurance for DoD NCW Environments
 Enabling Software Assurance for DoD NCW Environments Bob Stow VP Engineering & Technology BAE Systems Inc 15 February, 2006/Unclassified 1 BAE Systems A Leading Defense Company with a Commanding Breadth
Enabling Software Assurance for DoD NCW Environments Bob Stow VP Engineering & Technology BAE Systems Inc 15 February, 2006/Unclassified 1 BAE Systems A Leading Defense Company with a Commanding Breadth
Flying High. Typical methods
 1 Flying High MicroUAV (Unmanned Air Vehicles) Applications for Public Works APWA National Congress San Antonio, Texas September 2007 Mike Harrell, P.E. Senior Engineer mharrell@ara.com www.ara.com (p)
1 Flying High MicroUAV (Unmanned Air Vehicles) Applications for Public Works APWA National Congress San Antonio, Texas September 2007 Mike Harrell, P.E. Senior Engineer mharrell@ara.com www.ara.com (p)
EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS. Aerospace Controls Laboratory Massachusetts Institute of Technology
 EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS Ellis King, 1 Mehdi Alighanbari, Jonathan How 3 Aerospace Controls Laboratory Massachusetts Institute of Technology Abstract: This
EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS Ellis King, 1 Mehdi Alighanbari, Jonathan How 3 Aerospace Controls Laboratory Massachusetts Institute of Technology Abstract: This
Image-based Navigation for Shipboard
 Image-based Navigation for Shipboard Landing (INAV-SL) Navy TAP 2014 June 1-4, 2014 www.ssci.com Ship based UAS require robust auto-landing Ship based UAS require robust auto landing capabilities: Wide
Image-based Navigation for Shipboard Landing (INAV-SL) Navy TAP 2014 June 1-4, 2014 www.ssci.com Ship based UAS require robust auto-landing Ship based UAS require robust auto landing capabilities: Wide
Ontology and Rule Based Knowledge Representation for Situation Management and Decision Support
 Ontology and Rule Based Knowledge Representation for Situation Management and Decision Support Neelakantan Kartha, Aaron Novstrup 1 Stottler-Henke Associates Inc, 1107 NE 45 th Street, Suite 310, Seattle,
Ontology and Rule Based Knowledge Representation for Situation Management and Decision Support Neelakantan Kartha, Aaron Novstrup 1 Stottler-Henke Associates Inc, 1107 NE 45 th Street, Suite 310, Seattle,
BAE SYSTEMS North America Innovating for a Safer World 2003 Interoperability & Systems Integration Conference Industry Views
 BAE SYSTEMS North America Innovating for a Safer World 2003 Interoperability & Systems Integration Conference Industry Views Bob Stow North America Group VP Engineering, Technology, & Program Management
BAE SYSTEMS North America Innovating for a Safer World 2003 Interoperability & Systems Integration Conference Industry Views Bob Stow North America Group VP Engineering, Technology, & Program Management
Human Factors and Systems Engineering Explorations of Spaceflight Operations
 College of Engineering Human Factors and Systems Engineering Explorations of Spaceflight Operations Barrett S. Caldwell, PhD, CHFP Schools of Industrial Engineering / Aeronautics & Astronautics Purdue
College of Engineering Human Factors and Systems Engineering Explorations of Spaceflight Operations Barrett S. Caldwell, PhD, CHFP Schools of Industrial Engineering / Aeronautics & Astronautics Purdue
Miniature Air Launched Decoy (MALD ) & Future Concepts
 & Future Concepts") Miniature Air Launched Decoy (MALD ) & Future Concepts Presented at the NDIA 48th Annual Targets, UAVs & Range Operations Symposium & Exhibition 10/20/2010 Raytheon Missile Systems MALD is a registered
Miniature Air Launched Decoy (MALD ) & Future Concepts Presented at the NDIA 48th Annual Targets, UAVs & Range Operations Symposium & Exhibition 10/20/2010 Raytheon Missile Systems MALD is a registered
drone detection and neutralization system
 drone detection and neutralization system Response to growing market needs Demand for non-military counter-drone systems is driven by: the sudden growth of the unregulated drone market is causing more
drone detection and neutralization system Response to growing market needs Demand for non-military counter-drone systems is driven by: the sudden growth of the unregulated drone market is causing more
Three-Dimensional Path Planning of Unmanned Aerial Vehicles Using Particle Swarm Optimization
 Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 9-2006 Three-Dimensional Path Planning of Unmanned Aerial Vehicles Using Particle Swarm Optimization Jung
Mechanical Engineering Conference Presentations, Papers, and Proceedings Mechanical Engineering 9-2006 Three-Dimensional Path Planning of Unmanned Aerial Vehicles Using Particle Swarm Optimization Jung
PSS E. High-Performance Transmission Planning Application for the Power Industry. Answers for energy.
 PSS E High-Performance Transmission Planning Application for the Power Industry Answers for energy. PSS E architecture power flow, short circuit and dynamic simulation Siemens Power Technologies International
PSS E High-Performance Transmission Planning Application for the Power Industry Answers for energy. PSS E architecture power flow, short circuit and dynamic simulation Siemens Power Technologies International
Collaboration Between Unmanned Aerial and Ground Vehicles. Dr. Daisy Tang
 Collaboration Between Unmanned Aerial and Ground Vehicles Dr. Daisy Tang Key Components Autonomous control of individual agent Collaborative system Mission planning Task allocation Communication Data fusion
Collaboration Between Unmanned Aerial and Ground Vehicles Dr. Daisy Tang Key Components Autonomous control of individual agent Collaborative system Mission planning Task allocation Communication Data fusion
Sciences for Maneuver Campaign
 Dr. Mark J. Valco U.S. Army Research Laboratory Level 2 Ground Air Science & Technology enabled air and ground platform capabilities to significantly increase Army: Force effectiveness Rapid expeditionary
Dr. Mark J. Valco U.S. Army Research Laboratory Level 2 Ground Air Science & Technology enabled air and ground platform capabilities to significantly increase Army: Force effectiveness Rapid expeditionary
Mission Planning Systems for Earth Observation Missions
 Mission Planning Systems for Earth Observation Missions Marc Niezette Anite Systems GmbH Robert Bosch StraJ3e 7 Darmstadt, Germany Marc.Niezette@AniteSystems.de Abstract This paper describes two different
Mission Planning Systems for Earth Observation Missions Marc Niezette Anite Systems GmbH Robert Bosch StraJ3e 7 Darmstadt, Germany Marc.Niezette@AniteSystems.de Abstract This paper describes two different