Kit of Self-Moving Units for Automatic Inspection of Marine Structures and Plants: Low Cost Unit for Inspection of Holds
|
|
|
- Coleen Reed
- 6 years ago
- Views:
Transcription
1 Journal of Shipping Ocean Engineering 6 (2016) 1-14 doi / / D DAVID PUBLISHING Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: Low Cost Unit for Inspection of Holds Enrico Ravina Department of Electrical, Electronic, Telecommunication Engineering Naval Architecture, Polytechnic School, University of Genoa, Via Montallegro 1, Genoa, Italy Abstract: All vessels offshore units require regular inspections to prevent structural or functional damages. Periodical inspections are based on classification society s requirements include both visual surveys non-destructive test interventions, to look for structural damage, pitting, corrosion, thickness measurement, usually documented by measurements or images. Different approaches of inspection can be proposed for underwater for dry areas, using unmanned vehicles or service robots able to improve traditional inspection methods. Several excellent proposals are today available: neverless, reasons of costs, operation complexity impossibility to cover all types of inspection with a unique autonomous unit limit conditions applicability of automatic inspection systems. The paper is first of a series describing main results of a wide research activity carried out at DREAMS Lab (Laboratory of Drives Experimental Automation for Marine Systems) of University of Genoa. The studies are oriented to realization of a kit of low cost unsophisticated self-moving units, devoted to support some recursive inspections in dry areas of ships on offshore plants as bulkheads, holds, double bottoms ducts. The paper describes design prototyping of a pneumatronic unit oriented to inspection maintenance of ship holds. Conceived to realize a portable user-friendly tool which could take part of an inspection kit for use of inspectors, able to simplify speed up inspection visits with automatic generation of survey reports. Key words: Self-moving, marine inspection, non-destructive testing. 1. Introduction Traditional marine inspections in dry areas require preliminary expensive time-consuming interventions before proper inspection process. Installations of scaffolding (Fig. 1) allowing surveyor to inspect structures as bulkheads, beams stiffeners are included in traditional approaches. As an alternative, aerial articulated platforms of various geometry can be employed, transporting surveyor by a tower crane (Fig. 2). In any case, proper inspection is manual, with access of inspector in uncomfortable, critical, or potentially dangerous areas. In order to reduce costs time consumption to Corresponding author: Ravina Enrico, professor, research fields: drives, fluid power automation mechatronics for marine systems. improve speed up technical surveys, several proposals of autonomous robotized systems for marine vessel inspection are proposed. Some of se have been inspired by climbing robots designed for general locomotion adhesion tasks; ors are customized for ship areas. A great number of different types of devices for locomotion on surfaces have been designed, are applicable to general-purpose inspections inside ships: legged, implementing motion by adoption of legs [1, 2]; wheel-driven, combining wheels for translation/ rotation vacuum pumps/magnets for surface attachment [3, 4]; Tracked, using chain-tracks as locomotive mechanism [5];

![10]. From surface adhesion point of view, types proposed consider: suction, using vacuum suction cups [11, 12]; magnetic, employing permanent or electrical magnetization devices [13, 14]; gripping,](/docs-images/74/71457573/images/2-1.jpg "in which gripping devices allow climbing robot to travel within complex environments [15, 16]; rail-guided, pre-installing rails for sliding of robot [17, 18]; bio-mimetic, emulating, for instance,")
![sticking ability of geckos [19, 20] ]. It must be observed that not all adhesion proposals can be successfully applied in dry surface inspection of ship holds.](/docs-images/74/71457573/images/2-2.jpg "Inspectionn maintenance is a very real problem for classification societies, marine service providers, ship-owners, assurance societies it represents one of main elements for safety functionality of")

2 2 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: Fig. 1 Scaffolding articulated platform. Fig. 2 Models of articulated platforms. translation, using translational actuators with appropriate attachment devices [6, 7]; cable-driven [8]; combined, integrating different locomotive mechanismss to improve robot ability dexterity [9, 10]. From surface adhesion point of view, types proposed consider: suction, using vacuum suction cups [11, 12]; magnetic, employing permanent or electrical magnetization devices [13, 14]; gripping, in which gripping devices allow climbing robot to travel within complex environments [15, 16]; rail-guided, pre-installing rails for sliding of robot [17, 18]; bio-mimetic, emulating, for instance, sticking ability of geckos [19, 20] ]. It must be observed that not all adhesion proposals can be successfully applied in dry surface inspection of ship holds. Inspectionn maintenance is a very real problem for classification societies, marine service providers, ship-owners, assurance societies it represents one of main elements for safety functionality of ships offshore units. In particular, cargo holds tanks are subject to regular inspections maintenance measurements: many spacess are difficult to access tanks are often narrow. Cargo holds are larger spaces, but y reach easily heights over ten meters; use of scaffolding forces up not only costs but also, considering time required to built infrastructure, overall inspection time. From this point of view an automatic inspection process can speed up intervention. inspections are often still done manually reason is that ship environments are, in general, difficult for mobile inspection units. There are not general criteria of judgingg or deciding wher automatic units are certain to have advantages on inspection speed over traditional However, depending of case, a careful analysis on different expense items allows evaluating effective approaches. application, it is not realistic to propose use of a single mobile unit for inspections of all ship off-shore spaces: but kits of portable units can be designed to satisfy different requirements. EU-funded research projects (MINOAS, Marine inspection CApabilities for address this challenge in an attempt concepts for automation of ship inspectionn process. experienced dedicated partners in order to tackle issue of ship inspection, aiming to avoid ship accidents, promote maritime safety, protect environment. Within se projects original climbing units, as Clawer Clawer II [21, 22], based on magnetic adhesion, have been designed realized. At DREAMS Lab (Laboratory of Drives Experimental Automation for Marine Systems) of University of Genoa (Italy), are under continuous development research activities oriented to low cost compact On contrary, ship approaches. convenience to employ automatic Considering specific field of INspection robotic Assistant System, or INCASS, enhanced Ship Safety) to develop Thesee multifaceted projects integratee multi-functional climbing robots,
3 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: 3 supporting inspection survey certification in dry areas, with adhesion based on suction cups or magnets. Hereafter, main characteristics features of a prototype proposed for holds inspection are focused discussed, evaluating advantages criticisms. 2. Pneumatronic Climbing Prototype Internal inspections of marine structures plants are a topic of specific interest for DREAMS Lab. It is currently oriented towards developing low cost, fully or semi-autonomous, simple easily transportable modular kit units to be used as tools for inspector leaving task of selecting most appropriate unit for a particular survey [23-25]. A distinguishing aspect of followed design methodology of inspection units, in comparison to approaches followed by or researchers, is research of simplicity modularity. The unit is designed starting from a basic architecture, with possibility of enhancement adding customized modules able to perform specific tasks. This approach is followed not only in design of unit described in this paper, but in all designs of self-moving units under study for different inspection tasks in ship or off-shore units. The fundamental necessary requirements to unit can be synsized as follows: easy reliable working; capability of operation within hostile environments; simple programming; limited need for maintenance; on/off actuation, where possible; unsophisticated design; low cost; weight reduction. Fig. 3 shows basic geometry assumed as reference for design: it consists of a cross-shaped structure with four symmetric arms connected to a central frame. Each arm is a double acting linear actuator, equipped at its mobile end with attachment device to surface, moved by single acting actuators. In this way, motion of unit is combinationn of motions along two orthogonal directions. This could be significant if related to motion required on surfacess such as walls of holds. Typical geometry of se walls is Greek-shaped (Fig. 4), with recurrent dimensions (Φ= 63, d cg = 7000 mm, b f-cg = 700 mm, b w-cg: 783 mm; t t-net: 15 mm). The self-moving unit is sized on see dimensions. Fig. 5 sketches position of unit on a vertical surface: fundamentals for attachment devices are quotes a b as well as position of center of masss of unit. In order to define basic architecture of inspection unit, taking into account variety of geometries present into a hold, reference assumed is that of SKS tankers type (Fig. 6), where large areas can be inspected interventions of operator are required for positioning unit at beginning of different paths. These types of tankers have floor walls that are IMO. considered as an operative limit, though not selection of automatically but sporadic flat in consequence to double hull, imposed by Fig. 3 Basic geometry of climbing robot (A d, B d, C d, D d : main double acting actuators. A s s, B s, C s, D s : secondary single acting actuators).

4 4 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: Fig. 4 Typical Greek-shape surface of hold walls. Fig. 5 Sketch of unit on vertical surface. Fig. 6 Examples of SKS holds. 3. Anchoring The problems related to anchoring of inspection unit to surface under investigation, is subject of discussion among researchers, in particular with reference to technical products available on market, prioritizing low cost solutions. Fundamental problems related to surface, critical for anchorage, are related to presence of: polluting films (rust, oxides, environmental contaminating, absorbed gas films...); deposit of oil (greasy surface); mix between grease dirt or grimes; welding beads; surface defects or local differences of surface finishing. Possible methods of attachment involve: pneumatic suction cups; holding magnets; permanent magnetic strips; permanent magnetic walking beams; electrically settable permanent magnets; special magnet systems; spreading magnets. Different methods of attachment require a careful comparison in order to select not necessarily best solution but most suitable one. With reference to vacuum solutions, specific critical problems are related to metallic oily surfaces to presence of welding beads. In fact, friction coefficient between cup oily surface is often strongly reducedd with respect to contact on clean surface. Today friction cups specially designed for greasy surfaces allow overcoming of this criticism. Thanks to excellent grip on greasy surfaces, this type of suction cups can withst high shearing strains, typical 2-4 times higher than with conventional suction cups. Some specific components are suitable for curved or flat surfaces are manufactured in a specially developed material, with elastic properties like rubberr wearing qualities like polyurethane. Problems related to positioning of suction cup over a
5 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: 5 welding bead can be solved using multiple suction cup devices instead of single suction cups, by designing attachment device with sensors able to detect presence of welding, to adjust automatically device position in such a way welding is positioned between two cups. In addition, furr improvements can be reached using oval or rectangular suction cups, instead of classical circular geometry. With reference to magnetic attachment devices, criticisms concern rigid structure of magnet choice between permanent magnets electro-magnets. Difficulties of adaptation of magnet on irregular surfaces can be overcome using multiple magnets instead of one larger magnet. Permanent magnets simplify electrical wiring, but increase value of external applied force necessary to detach magnet. Electro-magnetic solutions are more flexible, but require an automatic control of activation/deactivation phases. Both pneumatic electrical attachments are considered in design of proposed unit: detailed designs have been developed for suction cups electro-magnets. 3.1 Pneumatic Anchoring Fig. 7 collects results of different types of suction cups in contact on steel surfaces: cup is loaded with axial forces of 25, 50, N under vacuum pressures of 20, 40, kpa. The anchoring condition is analyzed, distinguishing on five levels (from anchoring to immediate detaching). Surface, suction cups, levels considered are: Surfaces. S1: Steel; S2: Oiled Steel; S3: Oxidized Steel. Suction Cups. SC1: Flat, Silicon, 55 mm; SC2: Bellows, Rubber, 52 mm; SC3: Bellows, Silicon, 60 mm; SC4: Flat, NBR, 110 mm; SC5: Flat, NPV reinforced, 110 mm. Levels. 5: Immediate detaching; 4: Detaching with delay; 3: Fully slipping; 2: Partial slipping; 0: Anchoring. Of course, increasing diameter of suction cups (axial force being equal) number of correct anchoring increases. Fig. 8 reports one of results of test on silicon cups round bellow cups, showing deformation of cup vs. lateral force, under different vacuum pressure levels. These tests have been related to detailed analyses oriented to evaluate suction cup deformations displacements. In particular, lip in contact with surface is simulated using finite elements approaches for different sizes, materials geometries. Fig. 9 shows examples of this phase of analysis, in particular with reference to SC1 suction cup, previously cited. The cup is loaded with a lateral force of 50 N corresponding to condition of climbing unit anchored on steel vertical surface with only one couple of suction cups. The vacuum pressure is -40 kpa: lip is deformed but suction cup maintains anchorage. The critical level of lateral force producing detaching obviously depends to size to geometry of suction cup. 3.2 Magnetic Anchoring Criticisms related to application of permanent or electrical magnets concern real forces generated within attachment area real contact area, taking into account rigid structure of magnet. Solutions based on two or three magnets for each arm are studied tested. Table 1 reports characteristics of six electro-magnets (two for three different producers, conventionally named A, B C) in Table 2 is collected a comparison among se magnets, coupled in groups. Tests on slipping overturning conditions are implemented on steel oiled steel surfaces, distinguishing static contact (fully anchoring) to dynamic contact (beginning of slipping). Fig. 10 reports corresponding strain analyses for some of se anchorage solutions, showing good




6 6 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: Suction Cup Surface S1 S2 S3 SC1 SC2 SC3 SC4 SC5 Fig. 7 Tests on suction cups in contact with steel surfaces.

 (a) Fig.")
. (b) Table 1 Electro-magnets characteristics.")




7 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: 7 Fig. 8 (a) Tests on silicon (a) rubber (b) suction cups. (b) (a) Fig. 9 3D model of a suction cup: deformation (a) lip displacement (b). (b) Table 1 Electro-magnets characteristics. behavior of this rigid anchoring. The clamp is subject to a maximum stress of 47 MPa (Fig. 10 b), that decreases to 18 MPa adopting configuration with three magnets. 4. Model of Structure The concept design of unit take into account four different possible configurations: pneumatic attachment with external fluid power electrical supplies; pneumatic attachment with fluid power electrical supplies on board; magnetic attachment with external electricall power supply; magnetic attachment with on board electricall power supply. Solutions with external power supplies are simplified lighter but show disadvantage of


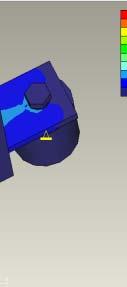






8 8 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: Table 2 Anchoring analyses on electro-magnets. (a) Fig. 10 (b) 3D models of magnets: geometries with two (a b) or three (c) magnets. (c)


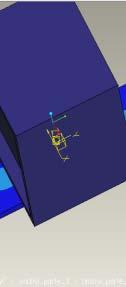
9 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: 9 umbilical cord. It limits path dexterity of unit but can be acceptable in specific confined spaces. Solutions with embedded power supplies requiree realization of an air-compressed reservoir on board installation of batteries having a sufficient autonomy to allow a practical use of unit. Fig. 11 shows case of embedded reservoir realized in central body of climbing unit. The analysis of stresses strains is developed using a 3D model of structure implemented in Pro-Engineer environment, under different constraint conditions, as shown in Fig. 12. Main settings concern Young s modulus Poisson s coefficient for materials of different parts of unit (Body: steel, E = 199,948 MPa, = Actuators clamps: aluminum, E = 73,084 MPa, = 0.33). The constraint characteristics Von Mises analysis are validated with experimental tests in presence of different kinds of surfaces Fig. 11 Sketch of structure (top side views) with embedded devices (quotes in mm). Displacements different superficial Case 1: Top constraint Case 2: Bottom constraint Case 3: Lateral constraint Fig. 12 Stress strain analyses.
 maximum value of strength is 30 MPa, significantly less than admissible limit of material (aluminum, 160 MPa); maximum displacement detected is 0.34 mm.")
10 10 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: status (clean, wet, oily, dirty). In case 1 (anchorage of unit in correspondence of C s actuator, in Fig. 1) maximum value of strength is 30 MPa, significantly less than admissible limit of material (aluminum, 160 MPa); maximum displacement detected is 0.34 mm. In case 2 unit is anchored in correspondence to actuator D s (Fig. 1) structure in stressed to compression: maximum value of strength is 34 MPa maximum displacement is 0.4 mm. Finally (case No. 3), structure of climbing unit is studied with connections at ends of arms A B (Fig. 1): this is most favorable condition, with minimum displacements (0.05 mm). On whole, implemented model fully satisfies strength displacement limits. It is used as reference to design of prototype hereafterr described. 5. Electronic Control System Equipment A micro-plc installed on board manages motion control. The basic architecture of unit plans that alll on-off signals drive actuations: having consider thatt pneumatic solution is a group of micro-valve (Fig. 11) that drive main actuators ejectors. PLC input signals are acquired by position sensors by vacuum gauges. The unit can be programmed to realize different paths, as shown in Fig. 13, taking into account shape of hold surfaces. More sophisticated geometries can use flow-rate or pressure proportional valves in order to generate steps defined by user. In this case, remotee wireless comm by joystick can be applied. Typical equipment mounted on unit to carry out non-destructive inspectionn tasks are: Fig. 13 Typical programmable paths.
, to obtain a complete mapping of inspected surface; micro rmo-cameras, to detect defects also in presence of")

.")

, ncreasing robot dexterity.")



11 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: 11 Fig. 14 Prototype of pneumatic climbing unit. micro video-cameras (wireless or with integrated battery), to obtain a complete mapping of inspected surface; micro rmo-cameras, to detect defects also in presence of puttying or painting; thickness ultrasonic measurement devices, detecting state of steel plates. 6. Experiments In order to test performances limitations of proposed unit a basic prototype has been constructed tested. The self-moving unit is able to climb on flat or low curvature surfaces, generically oriented. It is fully pneumatic, with four orthogonal crossed main actuators: each of m carries, at its end, anor cylinder able to lift to lower a couple of suction cups (Fig.14). Pneumatic valves drive also ejectors supporting suction cups; in order to reduce weigh to simplify pneumatic connections, driving system is realized as a group of compact pneumatic valves controlled by a micro-plc. All components are embedded on robot; in this way, umbilical cord connecting autonomous system to frame is reduced to a single hose to a single electrical wire (24 V power supply), ncreasing robot dexterity. Motion tests on different kinds of surfaces have been developed; climbing operations on horizontal, tilted vertical surfaces have been programmed, while also changing surface roughness motion sequence of robot. About roughness of steel plates reference assumed is European Stardd UNI EN 10130, classifying products in four classes: bright, Ra 0.4 µm semi bright, Ra 0.9 µm stard, 0.6 µm < Ra 1..9 µm rough, Ra > 1.6 µm Experimental tests have been mainly developed on stard plates. Climbing motions on steel, oiled steel, oxidized steel, glass, plastics, rolled wood, plasterss have been successfully tested. The structure of this type of climbing robot is rigid: neverless, specific tests have shown possibility to use it not only on flat surfaces, but also on low curvature walls (maximum radius of curvature 1,7000 mm), thanks to local deformations of suction cups. The overall dimensions of proposed prototype are mm, weight is 5.5 kg. Step sequences are completely programmable. The grippingg is assured by control of vacuum level inside cups: if level decreases below 0.8 bar unit stops itself, maintains position generates an air-raiclimbing is about 0.1 m/ /s: examination by video-camera is continuous, while examinations by warning. The average speed when unit is ors devices (e.g. UTM) require additional times related to specific measurement. The prototype has shown good technical reliability: cycles up to one thous steps with U-turns have been realized withoutt problems. The working performance




. This approach allows elimination of PLC on board but limits use to digital input/output signals.")



12 12 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: 7. Alternative e Geometries The corresponding prototype shows good performances on flat or low curvature surfaces, but it is not able to move itself on surfaces having variable curvatures. Fig. 15 shows an alternative geometry designed tested: it consists on an articulated unit using same types of anchoring devices but having an articulated geometry. It is able to move itself on a surface automatically recognize slope variation modifying position of front following surface slope. The unit shown in Fig. 15 allows climbing motions only in a single direction: it consists of two parts (front back) respectively mounted on articulated frames. If, during motion of robot, slope of surface varies, a contact less sensor detects this variation front part rotates automatically. This alternative solution includes an interesting improvement of motion control, substituting point-to-point control (by PLC) with a distributedd control (Actuator Sensor Interface, AS-I). This approach allows elimination of PLC on board but limits use to digital input/output signals. Micro-piezoelectric proportional valves are still under testt in anor alternative solution designed to enhancee flexibility of control by remote users. Fig. 15 Articulated self-moving unit. has been tested monitoring real deformation of structure by means of strain gauges: taking into account suction cup deformations, resultss are comparable with those obtained from numerical model. These results have been useful to validate numerical model, generating a parametric tool applicable in study of new units. Structural improvements could be studied passing from prototype to industrialized unit, in particular protecting electronic pneumatic devices from aggressive environments from unexpected impacts. 8. Concluding Remarks Ship inspection is a very real problem, involving aspects of cost, personnel employment, safety, instrumentation. It is currently performed manually re are not general rules or criteria able to decidee wher automatic approaches can substitute, entirely or partially, traditional methods. Anywayy self-moving units are attractive to automate several inspection phases. A low cost climbing self-moving unit oriented to inspection tasks is proposed. A parametric model able including sub-models of structure of anchoring devices (suction cups or electro-magnets) is developed. The corresponding prototype shows good
13 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: 13 performances on flat or low curvature surfaces, but it is not able to move itself on surfaces having variable curvatures. Articulated variations can be evaluated, taking into account increasing mechanical complexity. The prototype under study is equipped with basic instrumentation, but furr measurement devices can be easily placed on board. In particular, at moment prototype is not equipped with surface-recognition tools: but considering that it may be easier that robot s eye detects surface failures as it may be harder for human operator to be able to wholly appreciate defects on surfaces through use of conventional cameras, this aspect will be surely considered in furr development of unit. Or experiences, still under development, are oriented to eliminate umbilical cord, installing on board a micro-compressor batteries for electric power supply. The unit takes part of a low cost user-friendly kit of survey, conceived to support inspectors during periodic visits on board of ships offshore platforms; next papers will describe solutions proposed to inspection of ducts or pipes confined spaces. References [1] Kim, S., Asbeck, A. T., Cutkosky, M. R., Provancher, W. R Spinybot II: Climbing Hard Walls with Compliant Microspines. Proc. of 2005 IEEE International Conference on Robotics Automation: [2] Balaguer, C., Virk, G., Armada, M Robot Applications against Gravity. IEEE Robotics Automation Magazine 13 (1): 5-6. [3] Longo, D., Muscato, G A Modular Approach for Design of Alicia3 Climbing Robot for Industrial Inspection. Industrial Robot: An International Journal 31 (2): [4] Murphy, M. P., Tso, W., Tanzini, M., Sitti, M Waalbot: An Agile Small-Scale Wall Climbing Robot Utilizing Pressure Sensitive Adhesives. Proc. of 2006 IEEE/RSJ International Conference on Intelligent Robots Systems 12 (3): [5] Kim, H., Kim, D., Yang, H., Lee, K., Seo, K., Chang, D., Kim, J A Wall Climbing Robot with Vacuum Caterpillar Wheel System Operated by Mechanical Valve. Proc. of 9th International Conference on Climbing Walking Robots, [6] Backes, P. G., Bar Cohen, Y., Joffe, B The Multifunction Automated Crawling System (MACS). Proc. of 1997 IEEE International Conference on Robotics Automation, [7] Rosa, G. L., Messina, M., Muscato, G., Sinatra, R A Low-Cost Lightweight Climbing Robot for Inspection of Vertical Surfaces. Mechatronics 12 (1): [8] Tso, S. K., Fan, K. L., Fung, Y. H., Han, L., Tang, D. W., Liu, K. P., Tong, F Inspection of Large Tile Walls for Highrise Buildings Based on a Mechatronic Mobile System. Proc. of 2003 IEEE/ASME Intl. Conference on Advanced Intelligent Mechatronics, [9] Xiao, J., Xiao, J., Xi, N., Sheng, W Fuzzy Controller for Wall-Climbing Microrobots. Proc. of 2004 IEEE International Conference on Robotics Automation, [10] Elkmann, N., Kunst, D., Krueger, T., Lucke, M., Bohme, T., Felsch, T., Sturze, T SIRIUSc: Facade Cleaning Robot for a High-Rise Building in Munich, Germany. Proc. of 7th International Conference Climbing Walking Robots, [11] Hirose, S., Nagakubo, A., Toyama, R Machine That Can Walk Climb on Floors, Walls Ceilings. Proc. of International Conference on Advances in Robotics, [12] Pack, R. T., Christopher, J. L., Kawamura, K A Rubbertuator-Based Structure-Climbing Inspection Robot. Proc. of 1997 IEEE International Conference on Robotics Automation, [13] Faina, A., Souto, D., Deibe, A., Lopez-Pena, F., Duro, R. J., Fernez, X Development of a Climbing Robot for Grit Blasting Operations in Shipyards. Proc. IEEE Intl. Conf. on Robotics Automation, [14] Han, S. C., Kim, J., Yi, H. C A Novel Design of Permanent Magnet Wheel with Induction Pin for Mobile Robot. Int. J. Precis. Eng. Manuf. 10 (4): [15] Aracil, R., Saltaren, R. J., Reinoso, O A climbing Parallel Robot. IEEE Robotics Automation Magazine 13 (1): [16] Vona, M., Detweiler, C., Rus, D Shady: Robust Truss Climbing with Mechanical Compliances. Proc. of 2006 International Symposium of Experimental Robotics, [17] Warszawski, A Industrialized Automated Building Systems-A Managerial Approach, 2nd ed. Taylor & Francis. [18] Zhang, H., Zhang, J., Liu, R., Zong, G Realization of a Service Robot for Cleaning Spherical
14 14 Kit of Self-Moving Units for Automatic Inspection of Marine Structures Plants: Surfaces. Advanced Robotic Systems 2 (1): [19] Menon, C., Sitti, M A Biomimetic Climbing Robot Based on Gecko. Bionic Engineering 3 (3): [20] Cho, K. J., Koh, J. S., Kim, S., Chu, W. S., Hong, Y., Ahn, S. H Review of Manufacturing Processes for Soft Biomimetic Robots. Int. J. Precis. Eng. Manuf. 10 (3): [21] Bibuli M., Bruzzone G., Caccia M., Giacopelli, M., Petitti A., Spirelli, E MARC: Magnetic Autonomous Robotic Crawler Development Exploitation in MINOAS Project. 11th International Conference on Computer IT Applications in Maritime Industries. [22] Bibuli, M., Bruzzone, G., Caccia, M Robot Task Allocation Path-planning Systems in MINOAS Project Framework. 19th Mediterranean Conference on Control Automation. [23] Ravina, E A Pneumatic Climbing Robot for Inspection Tasks. 10th Scinavian International Conference on Fluid Power (SICFP07), [24] Ravina, E A Low Cost Pneumatronic Unit for Pipes Inspections. Proceedings of ASME th Biennial Conference on Engineering Systems Design Analysis. [25] Ravina, E Self-moving Units for Inspection Tasks of Marine Structures Plants. Proc. of NAV2015, 18th Intl. Conf. On Ships Shipping Research,
WALL SHAPE RECOGNITION USING LIMIT SWITCH MODULE
 WALL SHAPE RECOGNITION USING LIMIT SWITCH MODULE Dong Yeop Kim 1, Jae Min Lee 1, Jongsu Yoon 2, Tae-Keun Kim 1, Bong-Seok Kim 1, and Chang-Woo Park 1 1 Intelligent Robotics Research Center, Korea Electronics
WALL SHAPE RECOGNITION USING LIMIT SWITCH MODULE Dong Yeop Kim 1, Jae Min Lee 1, Jongsu Yoon 2, Tae-Keun Kim 1, Bong-Seok Kim 1, and Chang-Woo Park 1 1 Intelligent Robotics Research Center, Korea Electronics
SET PROJECT STRUCTURAL ANALYSIS OF A TROUGH MODULE STRUCTURE, IN OPERATION AND EMERGENCY Luca Massidda
 SET PROJECT STRUCTURAL ANALYSIS OF A TROUGH MODULE STRUCTURE, IN OPERATION AND EMERGENCY Luca Massidda Table of Contents Introduction... 2 Finite element analysis... 3 Model description... 3 Mirrors...
SET PROJECT STRUCTURAL ANALYSIS OF A TROUGH MODULE STRUCTURE, IN OPERATION AND EMERGENCY Luca Massidda Table of Contents Introduction... 2 Finite element analysis... 3 Model description... 3 Mirrors...
Optimization Design of Arm Frame of Folding Arm Type Tower Crane Based on ANSYS Ge-ning XU, Wen-ju LIU * and Yan-fei TAO
 2016 International Conference on Applied Mechanics, Mechanical and Materials Engineering (AMMME 2016) ISB: 978-1-60595-409-7 Optimization Design of Arm Frame of Folding Arm Type Tower Crane Based on ASYS
2016 International Conference on Applied Mechanics, Mechanical and Materials Engineering (AMMME 2016) ISB: 978-1-60595-409-7 Optimization Design of Arm Frame of Folding Arm Type Tower Crane Based on ASYS
YOUR FREE CHOICE IN BIG ROBOTS. For 700 to 5000 ton Injection Molding Machines 7X-45 7X-55 7X-100XL S7-45 S7-55 S
 -Axis Robots S7-45 S7-55 S7-75 5-Axis Robots 7X-45 7X-55 7X-00XL Sepro is the specialist in the automation of 700 to 5000 T injection molding machines. Our large robots offer is designed around a unique
-Axis Robots S7-45 S7-55 S7-75 5-Axis Robots 7X-45 7X-55 7X-00XL Sepro is the specialist in the automation of 700 to 5000 T injection molding machines. Our large robots offer is designed around a unique
Lifting Appliances of Ships and Offshore Installations
 CCS Rule Change Notice For: Lifting Appliances of Ships and Offshore Installations Version: May, 2016. RCN No.1 Effective date: 19 May, 2016 Beijing CONTENTS Chapter 3 CRANES, LIFTS, RAMPS AND SELF-LOADING
CCS Rule Change Notice For: Lifting Appliances of Ships and Offshore Installations Version: May, 2016. RCN No.1 Effective date: 19 May, 2016 Beijing CONTENTS Chapter 3 CRANES, LIFTS, RAMPS AND SELF-LOADING
ScienceDirect. Finite Element Simulation of a Mercantile Vessel Shipboard Under Working Conditions
 Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 69 ( 2014 ) 1001 1007 24th DAAAM International Symposium on Intelligent Manufacturing and Automation, 2013 Finite Element Simulation
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 69 ( 2014 ) 1001 1007 24th DAAAM International Symposium on Intelligent Manufacturing and Automation, 2013 Finite Element Simulation
Finite element checking of flange connection in integral hoisting of flare stack
 International Conference on Advanced Electronic Science and Technology (AEST 2016) Finite element checking of flange connection in integral hoisting of flare stack Xuanyu Sheng1,a, Hongzhi Zhang2 and You
International Conference on Advanced Electronic Science and Technology (AEST 2016) Finite element checking of flange connection in integral hoisting of flare stack Xuanyu Sheng1,a, Hongzhi Zhang2 and You
Biologically Inspired Miniature Robots
 Biologically Inspired Miniature Robots Metin Sitti sitti@cmu.edu Mechanical Engineering Robotics Institute / Electrical Eng. / Biomedical Eng. Carnegie Mellon University 18-200 Lecture Outline Introduction
Biologically Inspired Miniature Robots Metin Sitti sitti@cmu.edu Mechanical Engineering Robotics Institute / Electrical Eng. / Biomedical Eng. Carnegie Mellon University 18-200 Lecture Outline Introduction
Mechatronics Courses by School Period
 Mechatronics Courses by School Period Year One P1 P1 P2 P3 P3 P3 P4 P4 P4 Integrated Systems Industrial Math (Geometry, Trig, Algebra,) Blueprint Reading Machine Tool I (Hand tools-measuring-saws & Drill
Mechatronics Courses by School Period Year One P1 P1 P2 P3 P3 P3 P4 P4 P4 Integrated Systems Industrial Math (Geometry, Trig, Algebra,) Blueprint Reading Machine Tool I (Hand tools-measuring-saws & Drill
Compressive strength of double-bottom under alternate hold loading condition
 Progress in the Analysis and Design of Marine Structures Guedes Soares & Garbatov (Eds) 017 Taylor & Francis Group, London, ISBN 978-1-138-06907-7 Compressive strength of double-bottom under alternate
Progress in the Analysis and Design of Marine Structures Guedes Soares & Garbatov (Eds) 017 Taylor & Francis Group, London, ISBN 978-1-138-06907-7 Compressive strength of double-bottom under alternate
Page 1 of 46 Exam 1. Exam 1 Past Exam Problems without Solutions NAME: Given Formulae: Law of Cosines: C. Law of Sines:
 NAME: EXAM 1 PAST PROBLEMS WITHOUT SOLUTIONS 100 points Tuesday, September 26, 2017, 7pm to 9:30 You are allowed to use a calculator and drawing equipment, only. Formulae provided 2.5 hour time limit This
NAME: EXAM 1 PAST PROBLEMS WITHOUT SOLUTIONS 100 points Tuesday, September 26, 2017, 7pm to 9:30 You are allowed to use a calculator and drawing equipment, only. Formulae provided 2.5 hour time limit This
Earthquake Design of Flexible Soil Retaining Structures
 Earthquake Design of Flexible Soil Retaining Structures J.H. Wood John Wood Consulting, Lower Hutt 207 NZSEE Conference ABSTRACT: Many soil retaining wall structures are restrained from outward sliding
Earthquake Design of Flexible Soil Retaining Structures J.H. Wood John Wood Consulting, Lower Hutt 207 NZSEE Conference ABSTRACT: Many soil retaining wall structures are restrained from outward sliding
Gambit Centrum Oprogramowania i Szkoleń Sp. z o.o. Mathcad 14 Roark's Formulas for Stress and Strain
 Mathcad 14 Roark's Formulas for Stress and Strain Table of Contents About Mathcad E-Books Notes on the Organization and Special Features of Roark's Formulas for Stress and Strain Preface by Warren C. Young
Mathcad 14 Roark's Formulas for Stress and Strain Table of Contents About Mathcad E-Books Notes on the Organization and Special Features of Roark's Formulas for Stress and Strain Preface by Warren C. Young
Multidirectional_scaffolding MP
 Multidirectional_scaffolding MP 162 Company Projects Products Scaffoldings and Coverings MP MULTIDIRECTIONAL SCAFFOLDING The MP multidirectional system is the modern solution that reflects in an industrialized
Multidirectional_scaffolding MP 162 Company Projects Products Scaffoldings and Coverings MP MULTIDIRECTIONAL SCAFFOLDING The MP multidirectional system is the modern solution that reflects in an industrialized
AB-1020 EP Dust Free Vacuum Blast Machine
 AB-1020 EP Dust Free Vacuum Blast Machine This compact electric-pneumatic driven injection vacuum blasting machine with an average blasting pattern of 16 mm width, is excellent to apply for blast cleaning
AB-1020 EP Dust Free Vacuum Blast Machine This compact electric-pneumatic driven injection vacuum blasting machine with an average blasting pattern of 16 mm width, is excellent to apply for blast cleaning
DYNAMIC MODELLING AND SIMULATION OF A SIX WHEEL AUTOMATIC GUIDED VEHICLE
 DYNAMIC MODELLING AND SIMULATION OF A SIX WHEEL AUTOMATIC GUIDED VEHICLE Bittencourt G. F., gufbittencourt@poli.ufrj.br Student, Department of Mechanical Engineering, Polytechnic School, Federal University
DYNAMIC MODELLING AND SIMULATION OF A SIX WHEEL AUTOMATIC GUIDED VEHICLE Bittencourt G. F., gufbittencourt@poli.ufrj.br Student, Department of Mechanical Engineering, Polytechnic School, Federal University
Structural Design Model of Aerial Work Truss System for Tunnel Maintenance. *Dong-Kyu Lee 1)
") Structural Design Model of Aerial Work Truss System for Tunnel Maintenance *Dong-Kyu Lee 1) 1) Department of Architectural Engineering, Sejong University, Seoul, 143-747, Korea 1) dongkyulee@sejong.ac.kr
Structural Design Model of Aerial Work Truss System for Tunnel Maintenance *Dong-Kyu Lee 1) 1) Department of Architectural Engineering, Sejong University, Seoul, 143-747, Korea 1) dongkyulee@sejong.ac.kr
The Finite Element Analysis and Geometry Improvements of Some Structural Parts of a Diesel Forklift Truck
 Periodicals of Engineering and Natural Sciences ISSN 2303-4521 Vol.5, No.2, June 2017, pp. 202~209 Available online at: http://pen.ius.edu.ba The Finite Element Analysis and Geometry Improvements of Some
Periodicals of Engineering and Natural Sciences ISSN 2303-4521 Vol.5, No.2, June 2017, pp. 202~209 Available online at: http://pen.ius.edu.ba The Finite Element Analysis and Geometry Improvements of Some
Cladding in the Field of Industrial Applications
 Cladding in the Field of Industrial Applications Repair work with orbital welding equipment. Repair welding on the primary circuit of a nuclear power plant: a branch pipe is reconditioned by internal cladding
Cladding in the Field of Industrial Applications Repair work with orbital welding equipment. Repair welding on the primary circuit of a nuclear power plant: a branch pipe is reconditioned by internal cladding
To have a clear idea about what really happened and to prevent the
 Failure Analysis on Skunk-Arm of Electrical Tower Failure Analysis on Skunk-Arm of Electrical Tower ABSTRACT Ahmad Rivai 1, Md Radzai Said 2 1, 2 Faculty of Mechanical Engineering, Universiti Teknikal
Failure Analysis on Skunk-Arm of Electrical Tower Failure Analysis on Skunk-Arm of Electrical Tower ABSTRACT Ahmad Rivai 1, Md Radzai Said 2 1, 2 Faculty of Mechanical Engineering, Universiti Teknikal
Tests of R/C Beam-Column Joint with Variant Boundary Conditions and Irregular Details on Anchorage of Beam Bars
 October 1-17, 8, Beijing, China Tests of R/C Beam-Column Joint with Variant Boundary Conditions and Irregular Details on Anchorage of Beam Bars F. Kusuhara 1 and H. Shiohara 1 Assistant Professor, Dept.
October 1-17, 8, Beijing, China Tests of R/C Beam-Column Joint with Variant Boundary Conditions and Irregular Details on Anchorage of Beam Bars F. Kusuhara 1 and H. Shiohara 1 Assistant Professor, Dept.
Servo-hydraulic Universal Testing Machine HUT Type B
 Do Our Best for Your Test Servo-hydraulic Universal Testing Machine HUT Type B Load Frame Configuration: 6 columns, servo-controlled hydraulic Capacity: 300kN, 600kN, 1000kN, 3000kN Test Space: Dual zone
Do Our Best for Your Test Servo-hydraulic Universal Testing Machine HUT Type B Load Frame Configuration: 6 columns, servo-controlled hydraulic Capacity: 300kN, 600kN, 1000kN, 3000kN Test Space: Dual zone
SPECIFICATIONS - DETAILED PROVISIONS Section Stainless Steel Sluice Gates C O N T E N T S
 SPECIFICATIONS - DETAILED PROVISIONS Section 11294 - Stainless Steel Sluice Gates C O N T E N T S PART 1 - GENERAL... 1 1.01 SUMMARY... 1 1.02 REFERENCES... 1 1.03 DEFINITIONS... 1 1.04 DESIGN REQUIREMENTS...
SPECIFICATIONS - DETAILED PROVISIONS Section 11294 - Stainless Steel Sluice Gates C O N T E N T S PART 1 - GENERAL... 1 1.01 SUMMARY... 1 1.02 REFERENCES... 1 1.03 DEFINITIONS... 1 1.04 DESIGN REQUIREMENTS...
conveyours and dividers
 conveyours and dividers EN SMILINE DIVISION Fluid transport of the products The transport of containers and products from a machine to another one within a bottling line is a crucial factor in order to
conveyours and dividers EN SMILINE DIVISION Fluid transport of the products The transport of containers and products from a machine to another one within a bottling line is a crucial factor in order to
BRANZ FACTS RESILIENT NON-STRUCTURAL ELEMENTS SEISMICALLY RESILIENT NON-STRUCTURAL ELEMENTS # 3. Restraint systems
 SEISMICALLY BRANZ FACTS RESILIENT NON-STRUCTURAL ELEMENTS SEISMICALLY RESILIENT DESIGN CRITERIA # 2 NON-STRUCTURAL ELEMENTS # 3 Restraint systems The next step in the non-specific design pathway in NZS
SEISMICALLY BRANZ FACTS RESILIENT NON-STRUCTURAL ELEMENTS SEISMICALLY RESILIENT DESIGN CRITERIA # 2 NON-STRUCTURAL ELEMENTS # 3 Restraint systems The next step in the non-specific design pathway in NZS
8 Design Specification
 This document is not an API Standard; it is under consideration within an API technical committee but has not received all approvals required to become an API Standard. It shall not be reproduced or circulated
This document is not an API Standard; it is under consideration within an API technical committee but has not received all approvals required to become an API Standard. It shall not be reproduced or circulated
Stage analysdeckis for deck erection of single-pylon suspension bridge
 Stage analysdeckis for deck erection of single-pylon suspension bridge *Hyun-sok Choi 1), Sung-Ho Kim 2), Seo-Kyung Cho 3), Hyun-Moo Koh 4) 1), 2), 3) Civil Business Division, Daelim Industrial.,Seoul,
Stage analysdeckis for deck erection of single-pylon suspension bridge *Hyun-sok Choi 1), Sung-Ho Kim 2), Seo-Kyung Cho 3), Hyun-Moo Koh 4) 1), 2), 3) Civil Business Division, Daelim Industrial.,Seoul,
Automatic Panel Bender: Today's solution. For your tomorrow.
 Automatic Panel Bender: Today's solution. For your tomorrow. A winning solution to shape the future. The P4 Panel Bender is a smart manufacturing tool, invented by Guido Salvagnini in 1979, designed for
Automatic Panel Bender: Today's solution. For your tomorrow. A winning solution to shape the future. The P4 Panel Bender is a smart manufacturing tool, invented by Guido Salvagnini in 1979, designed for
TECHNICAL SPECIFICATION
 TECHNICAL SPECIFICATION ABP SERIES OF AUTOMATIC BLISTER PACKAGING MACHINERY Ridat ABP series of machines are some of the most advanced models in the comprehensive range of Ridat blister packaging equipment.
TECHNICAL SPECIFICATION ABP SERIES OF AUTOMATIC BLISTER PACKAGING MACHINERY Ridat ABP series of machines are some of the most advanced models in the comprehensive range of Ridat blister packaging equipment.
Compressive strength of double-bottom under alternate hold loading condition
 Compressive strength of double-bottom under alternate hold loading condition J.M. Gordo CENTEC, IST, University of Lisbon, Portugal ABSTRACT: The alternate bending of the bottom structure of a ship as
Compressive strength of double-bottom under alternate hold loading condition J.M. Gordo CENTEC, IST, University of Lisbon, Portugal ABSTRACT: The alternate bending of the bottom structure of a ship as
ALARIS CONSOLE ABOUT ALARIS CONSOLE ALARIS CONSOLE FEATURES. Product Specification Document Date Published: September 17, 2004
 Product Specification Document Date Published: September 17, 2004 ALARIS CONSOLE ABOUT ALARIS CONSOLE Alaris is designed specifically for mission critical operations such as in Air Traffic Control (ATC)
Product Specification Document Date Published: September 17, 2004 ALARIS CONSOLE ABOUT ALARIS CONSOLE Alaris is designed specifically for mission critical operations such as in Air Traffic Control (ATC)
Contents EN 14015:2004 (E) page
 page") Contents page Foreword... 11 1 Scope... 12 2 Normative references... 13 3 Terms, definitions, symbols and abbreviations... 15 3.1 Terms and definitions... 15 3.2 Symbols... 19 3.3 Abbreviations... 21 4
Contents page Foreword... 11 1 Scope... 12 2 Normative references... 13 3 Terms, definitions, symbols and abbreviations... 15 3.1 Terms and definitions... 15 3.2 Symbols... 19 3.3 Abbreviations... 21 4
NPTEL Course. GROUND IMPROVEMENT Factors affecting the behaviour and performance of reinforced soil
 Lecture 27 NPTEL Course GROUND IMPROVEMENT Factors affecting the behaviour and performance of reinforced soil Prof. G L Sivakumar Babu Department of Civil Engineering Indian Institute of Science Bangalore
Lecture 27 NPTEL Course GROUND IMPROVEMENT Factors affecting the behaviour and performance of reinforced soil Prof. G L Sivakumar Babu Department of Civil Engineering Indian Institute of Science Bangalore
Skirted Spudcan Sheet Pile Wall Interaction during Jack- Up Rig Installation and Removal in a Harbour Area
 Skirted Spudcan Sheet Pile Wall Interaction during Jack- Up Rig Installation and Removal in a Harbour Area L. Kellezi GEO - Danish Geotechnical Institute 1 Maglebjergvej, DK 2800 Copenhagen, Denmark G.
Skirted Spudcan Sheet Pile Wall Interaction during Jack- Up Rig Installation and Removal in a Harbour Area L. Kellezi GEO - Danish Geotechnical Institute 1 Maglebjergvej, DK 2800 Copenhagen, Denmark G.
8 Design Specification
 This document is not an API Standard; it is under consideration within an API technical committee but has not received all approvals required to become an API Standard. It shall not be reproduced or circulated
This document is not an API Standard; it is under consideration within an API technical committee but has not received all approvals required to become an API Standard. It shall not be reproduced or circulated
Super SCAMP: Relevant Scaling Considerations for Perching and Climbing with a Multimodal Robot
 8/25/2017 Andrew Edoimioya SURI Project Summary, Summer 2017 Biomimetic and Dexterous Laboratory Department of Mechanical Engineering, Stanford University Super SCAMP: Relevant Scaling Considerations for
8/25/2017 Andrew Edoimioya SURI Project Summary, Summer 2017 Biomimetic and Dexterous Laboratory Department of Mechanical Engineering, Stanford University Super SCAMP: Relevant Scaling Considerations for
Level 6 Graduate Diploma in Engineering Structural analysis
 9210-111 Level 6 Graduate Diploma in Engineering Structural analysis Sample Paper You should have the following for this examination one answer book non-programmable calculator pen, pencil, ruler, drawing
9210-111 Level 6 Graduate Diploma in Engineering Structural analysis Sample Paper You should have the following for this examination one answer book non-programmable calculator pen, pencil, ruler, drawing
Design and fabrication of functionally graded components by selective laser melting. C. N. Sun*#, S. Y. Choy*+, K. F. Leong*+, J.
 Solid Freeform Fabrication 216: Proceedings of the 26th 27th Annual International Solid Freeform Fabrication Symposium An Additive Manufacturing Conference Design and fabrication of functionally graded
Solid Freeform Fabrication 216: Proceedings of the 26th 27th Annual International Solid Freeform Fabrication Symposium An Additive Manufacturing Conference Design and fabrication of functionally graded
Lecture 3-2: Hull production Steel processing methods
 Kul-24.4130 Shipyard engineering Lecture 3-2: Hull production Steel processing methods Applied Mechanics Marine Technology Lecture in course contents Production planning Introduction Shipbuilding process
Kul-24.4130 Shipyard engineering Lecture 3-2: Hull production Steel processing methods Applied Mechanics Marine Technology Lecture in course contents Production planning Introduction Shipbuilding process
CHAPTER 4. Design of Innovative Creep Testing Facility under Flowing. Sodium
 CHAPTER 4 Design of Innovative Creep Testing Facility under Flowing Sodium 4.1 Introduction In this chapter, design of an innovative creep testing system comprising of a lever arm type creep machine with
CHAPTER 4 Design of Innovative Creep Testing Facility under Flowing Sodium 4.1 Introduction In this chapter, design of an innovative creep testing system comprising of a lever arm type creep machine with
WALL CANTILEVER WORK STATION JIB CRANE
 SECTION 14662 WALL CANTILEVER WORK STATION JIB CRANE ***** Gorbel, Inc. manufactures a broad range of material handling cranes including monorail, bridge, gantry, and jib cranes. Numerous work station
SECTION 14662 WALL CANTILEVER WORK STATION JIB CRANE ***** Gorbel, Inc. manufactures a broad range of material handling cranes including monorail, bridge, gantry, and jib cranes. Numerous work station
Finite element analysis on steel-concrete-steel sandwich composite beams with J-hook shear connectors
 Finite element analysis on steel-concrete-steel sandwich composite beams with J-hook shear connectors Jia-bao Yan 1), J.Y.Richard Liew 2), Min-hong Zhang 3), and Zhenyu Huang 4) 1)~4) Department of Civil
Finite element analysis on steel-concrete-steel sandwich composite beams with J-hook shear connectors Jia-bao Yan 1), J.Y.Richard Liew 2), Min-hong Zhang 3), and Zhenyu Huang 4) 1)~4) Department of Civil
Guidance for Structural Strength Assessment of Pump Tower of LNG Carriers
 2017 Guidance for Structural Strength Assessment of Pump Tower of LNG Carriers GC-20-E KR APPLICATION OF "GUIDANCE FOR STRUCTURAL STRENGTH ASSESSMENT OF PUMP TOWER OF LNG CARRIERS " 1. Unless expressly
2017 Guidance for Structural Strength Assessment of Pump Tower of LNG Carriers GC-20-E KR APPLICATION OF "GUIDANCE FOR STRUCTURAL STRENGTH ASSESSMENT OF PUMP TOWER OF LNG CARRIERS " 1. Unless expressly
Hydraulic systems Quality without cutting corners
 Hydraulic systems Quality without cutting corners HYDRAULIC SYSTEMS Hydraulics: Large forces in a small space Movements in plant and machinery need the advantages of hydraulics: Large forces in a small
Hydraulic systems Quality without cutting corners HYDRAULIC SYSTEMS Hydraulics: Large forces in a small space Movements in plant and machinery need the advantages of hydraulics: Large forces in a small
ELEVATORS & SERVICE LIFTS FREIGHT HOIST MAST LIFTS FREIGHT HOIST SCISSOR LIFTS ELEVATING DOCK SCISSOR LIFTS DOCK LEVELLERS
 ELEVATORS & SERVICE LIFTS FREIGHT HOIST MAST LIFTS FREIGHT HOIST SCISSOR LIFTS ELEVATING DOCK SCISSOR LIFTS DOCK LEVELLERS McGrath Industries Ltd. 2017. All rights reserved. Ed04, CJM. ELEVATORS SERVICE
ELEVATORS & SERVICE LIFTS FREIGHT HOIST MAST LIFTS FREIGHT HOIST SCISSOR LIFTS ELEVATING DOCK SCISSOR LIFTS DOCK LEVELLERS McGrath Industries Ltd. 2017. All rights reserved. Ed04, CJM. ELEVATORS SERVICE
Piezoelectric All-Rounder
 Piezoelectric All-Rounder Sensor, Actuator or Both? PI Ceramic GmbH, Lindenstraße, 07589 Lederhose, Germany Page 1 of 5 The Piezo Effect By the end of the 19th century Jacques und Pierre Curie had already
Piezoelectric All-Rounder Sensor, Actuator or Both? PI Ceramic GmbH, Lindenstraße, 07589 Lederhose, Germany Page 1 of 5 The Piezo Effect By the end of the 19th century Jacques und Pierre Curie had already
DIN EN : (E)
") DIN EN 13480-3:2013-11 (E) Metallic industrial piping - Part 3: Design and calculation Contents Page Foreword... 9 1 Scope... 11 2 Normative references... 11 3 Terms, definitions, symbols and units...
DIN EN 13480-3:2013-11 (E) Metallic industrial piping - Part 3: Design and calculation Contents Page Foreword... 9 1 Scope... 11 2 Normative references... 11 3 Terms, definitions, symbols and units...
Status of Design and Research & Development for ITER Sector Sub-assembly Tools
 1 ITR/P1-47 Status of Design and Research & Development for ITER Sector Sub-assembly Tools K.O. Nam 1), H.K. Park 1), D.J. Kim 1), H.J. Ahn 1), J.H. Lee 2), K.K. Kim 2), K. Im 3), R. Shaw 3) 1) National
1 ITR/P1-47 Status of Design and Research & Development for ITER Sector Sub-assembly Tools K.O. Nam 1), H.K. Park 1), D.J. Kim 1), H.J. Ahn 1), J.H. Lee 2), K.K. Kim 2), K. Im 3), R. Shaw 3) 1) National
 763.389.9475 www.erdmanautomation.com The Erdman 3M VHB Structural Glazing Tape Applicator, Frame Assembly & Glass Lay-in System Erdman 3M VHB Structural Glazing Tape Applicator, Frame Assembly and Glass
763.389.9475 www.erdmanautomation.com The Erdman 3M VHB Structural Glazing Tape Applicator, Frame Assembly & Glass Lay-in System Erdman 3M VHB Structural Glazing Tape Applicator, Frame Assembly and Glass
Development and Testing of a Post-Installed Deepwater Monitoring System Using Fiber-Optic Sensors
 OMAE2015-41305 Development and Testing of a Post-Installed Deepwater Monitoring System Using Fiber-Optic Sensors C. H. Seaman, NASA Johnson Space Center D. V. Brower, Astro Technology Inc. H. H. Tang,
OMAE2015-41305 Development and Testing of a Post-Installed Deepwater Monitoring System Using Fiber-Optic Sensors C. H. Seaman, NASA Johnson Space Center D. V. Brower, Astro Technology Inc. H. H. Tang,
A simple but accurate device and method for bending and stress measurement of metallic structures
 IOSR Journal of Engineering (IOSRJEN) ISSN: 2250-3021 Volume 2, Issue 6 (June 2012), PP 1334-1339 www.iosrjen.org A simple but accurate device and method for bending and stress measurement of metallic
IOSR Journal of Engineering (IOSRJEN) ISSN: 2250-3021 Volume 2, Issue 6 (June 2012), PP 1334-1339 www.iosrjen.org A simple but accurate device and method for bending and stress measurement of metallic
Modelling of Material Removal in Abrasive Flow Machining Process Using CFD Simulation
 Journal of Basic and Applied Engineering Research Print ISSN: 2350-0077; Online ISSN: 2350-0255; Volume 1, Number 2; October, 2014 pp. 73-78 Krishi Sanskriti Publications http://www.krishisanskriti.org/jbaer.html
Journal of Basic and Applied Engineering Research Print ISSN: 2350-0077; Online ISSN: 2350-0255; Volume 1, Number 2; October, 2014 pp. 73-78 Krishi Sanskriti Publications http://www.krishisanskriti.org/jbaer.html
Cut-to-length and Slitting line for processing coil metal with thickness 0,4 2,0 mm and width 1250 mm
 Ruscana Engineering Group Russia, 142143, Moscow region, Podolsk city, village Bykovo, Centralnaya Street, 6 tel./fax: (499) 400-40-63, tel.: (495) 660-16-25, 721-69-91 www.ruscana-engineering.com E-mail:
Ruscana Engineering Group Russia, 142143, Moscow region, Podolsk city, village Bykovo, Centralnaya Street, 6 tel./fax: (499) 400-40-63, tel.: (495) 660-16-25, 721-69-91 www.ruscana-engineering.com E-mail:
Fagà, Bianco, Bolognini, and Nascimbene 3rd fib International Congress
 COMPARISON BETWEEN NUMERICAL AND EXPERIMENTAL CYCLIC RESPONSE OF ALTERNATIVE COLUMN TO FOUNDATION CONNECTIONS OF REINFORCED CONCRETEC PRECAST STRUCTURES Ettore Fagà, Dr, EUCENTRE, Pavia, Italy Lorenzo
COMPARISON BETWEEN NUMERICAL AND EXPERIMENTAL CYCLIC RESPONSE OF ALTERNATIVE COLUMN TO FOUNDATION CONNECTIONS OF REINFORCED CONCRETEC PRECAST STRUCTURES Ettore Fagà, Dr, EUCENTRE, Pavia, Italy Lorenzo
Pulsed Eddy Current Testing (PECT) Inspection Technique
 Inspection Technique") Introduction Pulsed Eddy Current Testing (PECT) is an inspection technique used for corrosion under insulation (CUI) screening on carbon steel structures as pipes, vessels, tanks and spherical tank legs
Introduction Pulsed Eddy Current Testing (PECT) is an inspection technique used for corrosion under insulation (CUI) screening on carbon steel structures as pipes, vessels, tanks and spherical tank legs
EXPERIMENTAL PROGRAMME
 CHAPTER 3 EXPERIMENTAL PROGRAMME 3.1 INTRODUCTION The critical review of the literature presented in the previous chapter reveals the limitations of the experimental studies carried out so far in the field
CHAPTER 3 EXPERIMENTAL PROGRAMME 3.1 INTRODUCTION The critical review of the literature presented in the previous chapter reveals the limitations of the experimental studies carried out so far in the field
Air Cargo Heavy Duty Scissor Lift Premium High Capacity Dock Lift with Conveyor for Safe Transfer of Cargo between Trucks and Dock
 Air Cargo Heavy Duty Scissor Lift Premium High Capacity Dock Lift with Conveyor for Safe Transfer of Cargo between Trucks and Dock Because of its premium features and ability to provide up to five times
Air Cargo Heavy Duty Scissor Lift Premium High Capacity Dock Lift with Conveyor for Safe Transfer of Cargo between Trucks and Dock Because of its premium features and ability to provide up to five times
Basic quantities of earthquake engineering. Strength Stiffness - Ductility
 Basic quantities of earthquake engineering Strength Stiffness - Ductility 1 Stength is the ability to withstand applied forces. For example a concrete element is weak in tension but strong in compression.
Basic quantities of earthquake engineering Strength Stiffness - Ductility 1 Stength is the ability to withstand applied forces. For example a concrete element is weak in tension but strong in compression.
Seoul National University, San 56-1, Shillim-Dong, Kwanak-Gu, Seoul, Korea,
 18 TH INTERNATIONAL CONFERENCE ON COMPOSITE MATERIALS DEVELOPMENT OF CFRP PRECISION GANTRY BEAMS FOR 11 TH GENERATION LCD PANEL MANUFACTURING B. Bhandari 1, G.Y. Lee 1, D.S. Choi 2, J.H. Kim 2 and S.H.
18 TH INTERNATIONAL CONFERENCE ON COMPOSITE MATERIALS DEVELOPMENT OF CFRP PRECISION GANTRY BEAMS FOR 11 TH GENERATION LCD PANEL MANUFACTURING B. Bhandari 1, G.Y. Lee 1, D.S. Choi 2, J.H. Kim 2 and S.H.
THE DESIGN AND FABRICATION OF AN AUTOMATED SHEAR STUD WELDING SYSTEM. Andrew Glenn Ziegler, Research Assistant
 THE DESIGN AND FABRICATION OF AN AUTOMATED SHEAR STUD WELDING SYSTEM Andrew Glenn Ziegler, Research Assistant Alexander Henry Slocum, Assistant Professor of Civil Engineering Massachusetts Institute of
THE DESIGN AND FABRICATION OF AN AUTOMATED SHEAR STUD WELDING SYSTEM Andrew Glenn Ziegler, Research Assistant Alexander Henry Slocum, Assistant Professor of Civil Engineering Massachusetts Institute of
LTSH boiler tube inspection in power plant by in-house developed Robotic inspection system Rakesh Kumar Chakraborty and Kishore Aggarwal
 More Info at Open Access Database www.ndt.net/?id=15178 LTSH boiler tube inspection in power plant by in-house developed Robotic inspection system Rakesh Kumar Chakraborty and Kishore Aggarwal NTPC Energy
More Info at Open Access Database www.ndt.net/?id=15178 LTSH boiler tube inspection in power plant by in-house developed Robotic inspection system Rakesh Kumar Chakraborty and Kishore Aggarwal NTPC Energy
Automatic panel bender: Today's solution. For your tomorrow.
 Automatic panel bender: Today's solution. For your tomorrow. A winning solution to shape the future. The P4 panel bender is a smart manufacturing tool, invented by Guido Salvagnini in 1977, designed for
Automatic panel bender: Today's solution. For your tomorrow. A winning solution to shape the future. The P4 panel bender is a smart manufacturing tool, invented by Guido Salvagnini in 1977, designed for
NORTHWESTERN UNIVERSITY PROJECT NAME JOB # ISSUED: 03/29/2017
 SECTION 22 0548 - PIPING AND EQUIPMENT PART 1 - GENERAL 1.1 RELATED DOCUMENTS A. Drawings and general provisions of the Contract, including General and Supplementary Conditions and Division 01 Specification
SECTION 22 0548 - PIPING AND EQUIPMENT PART 1 - GENERAL 1.1 RELATED DOCUMENTS A. Drawings and general provisions of the Contract, including General and Supplementary Conditions and Division 01 Specification
PACKAGING MACHINE WITH 6 AXES ROBOTIC ARM. Experimental capabilities
 PACKAGING MACHINE WITH 6 AXES ROBOTIC ARM Experimental capabilities - Production line management: format change following production sheets & process, mechanical adjustments, tooling changes following
PACKAGING MACHINE WITH 6 AXES ROBOTIC ARM Experimental capabilities - Production line management: format change following production sheets & process, mechanical adjustments, tooling changes following
ADVANCED SYSTEMS THAT PAY OFF SMART CRANE FEATURES
 ADVANCED SYSTEMS THAT PAY OFF SMART CRANE FEATURES Konecranes Konecranes PRODUCTIVITY THANKS TO ERGONOMICS AND SAFETY BENEFITS FOR ALL Konecranes is a leading manufacturer of mobile harbor cranes for productive
ADVANCED SYSTEMS THAT PAY OFF SMART CRANE FEATURES Konecranes Konecranes PRODUCTIVITY THANKS TO ERGONOMICS AND SAFETY BENEFITS FOR ALL Konecranes is a leading manufacturer of mobile harbor cranes for productive
STRUCTURAL DESIGN AND FEM ANALYSIS OF BUTTERFLY VALVE
 STRUCTURAL DESIGN AND FEM ANALYSIS OF BUTTERFLY VALVE V. LOKESH VARMA, (M.Tech Scholar), Department of Mechanical Engineering, Malla Reddy Engineering College, Maisammaguda, Hyderabad. Email id: lokesh5654@gmail.com
STRUCTURAL DESIGN AND FEM ANALYSIS OF BUTTERFLY VALVE V. LOKESH VARMA, (M.Tech Scholar), Department of Mechanical Engineering, Malla Reddy Engineering College, Maisammaguda, Hyderabad. Email id: lokesh5654@gmail.com
Contact Analysis of Frictional Motion between Fiber Reinforced Polymer (FRP) Races and Cylindrical Roller Bearing
 Races and Cylindrical Roller Bearing") Contact Analysis of Frictional Motion between Fiber Reinforced Polymer (FRP) Races and Cylindrical Roller Bearing Shanagonda Sahith 1, Goulla Aravind Reddy 2 1, 2 Mechanical Engineer (B.Tech), Vignan Institute
Contact Analysis of Frictional Motion between Fiber Reinforced Polymer (FRP) Races and Cylindrical Roller Bearing Shanagonda Sahith 1, Goulla Aravind Reddy 2 1, 2 Mechanical Engineer (B.Tech), Vignan Institute
Material handling solutions
 DESCRIPTION In this competitive world production plays a major role in manufacturing industries. Transferring of the component manually takes a large amount of time in the material handling process. Efforts
DESCRIPTION In this competitive world production plays a major role in manufacturing industries. Transferring of the component manually takes a large amount of time in the material handling process. Efforts
SHEAR AND BUCKLING STRENGTHENING OF STEEL BRIDGE GIRDER USING SMALL-DIAMETER CFRP STRANDS
 20 th International Conference on Composite Materials Copenhagen, 19-24 th July 2015 SHEAR AND BUCKLING STRENGTHENING OF STEEL BRIDGE GIRDER USING SMALL-DIAMETER CFRP STRANDS Hamid Kazem 1, Sami Rizkalla
20 th International Conference on Composite Materials Copenhagen, 19-24 th July 2015 SHEAR AND BUCKLING STRENGTHENING OF STEEL BRIDGE GIRDER USING SMALL-DIAMETER CFRP STRANDS Hamid Kazem 1, Sami Rizkalla
Automatic hardness testing devices
 Automatic hardness testing devices The measure of hardness, applied to rubber and plastic, is a measure of stiffness obtained from an indentation test. An indentor is pressed into the sample under a given
Automatic hardness testing devices The measure of hardness, applied to rubber and plastic, is a measure of stiffness obtained from an indentation test. An indentor is pressed into the sample under a given
Cantilever Racking. Cantilever Racking
 Cantilever Racking Cantilever Racking Cantilever raking is specially designed to store long or varying length items, such as metal beams, pipes, moulding, wooden boards, metal and plastic sheets among
Cantilever Racking Cantilever Racking Cantilever raking is specially designed to store long or varying length items, such as metal beams, pipes, moulding, wooden boards, metal and plastic sheets among
Finite Element Analysis for Structural Performance of Offshore Platforms
 Finite Element Analysis for Structural Performance of Offshore Platforms Jueren Xie C-FER Technologies, Canada Outline Introduction of offshore platforms Design considerations FEA modeling considerations
Finite Element Analysis for Structural Performance of Offshore Platforms Jueren Xie C-FER Technologies, Canada Outline Introduction of offshore platforms Design considerations FEA modeling considerations
Static linear analysis for trusses structure for supporting pipes
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Static linear analysis for trusses structure for supporting pipes To cite this article: M Urdea 2018 IOP Conf. Ser.: Mater. Sci.
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Static linear analysis for trusses structure for supporting pipes To cite this article: M Urdea 2018 IOP Conf. Ser.: Mater. Sci.
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 3, September 2016, Page 44
 Computer Aided Drafting, Design and Manufacturing Volume 26, Number 3, September 2016, Page 44 CADDM Sheet material lifting mechanism of manipulator Hong Chao 1, Zou Congcong 1, Huang Bingshun 2, Zhang
Computer Aided Drafting, Design and Manufacturing Volume 26, Number 3, September 2016, Page 44 CADDM Sheet material lifting mechanism of manipulator Hong Chao 1, Zou Congcong 1, Huang Bingshun 2, Zhang
Vierendeel Steel Truss / Composite Skin Hull Test
 Final Report Project I, ONR Grant No. N00014-01-1-0956 Non-magnetic Stainless Steel for Double Hull Ship Construction by Joachim L. Grenestedt, Ph.D. jog5@lehigh.edu Richard Sause, Ph.D. rs0c@lehigh.edu
Final Report Project I, ONR Grant No. N00014-01-1-0956 Non-magnetic Stainless Steel for Double Hull Ship Construction by Joachim L. Grenestedt, Ph.D. jog5@lehigh.edu Richard Sause, Ph.D. rs0c@lehigh.edu
Analysis and experimental studies of building glass facade
 Analysis and experimental studies of building glass facade Ján BUJŇÁK Professor, University of Žilina, Žilina, Slovakia Ján Bujňák, born 1950, received his civil engineering degree from the University
Analysis and experimental studies of building glass facade Ján BUJŇÁK Professor, University of Žilina, Žilina, Slovakia Ján Bujňák, born 1950, received his civil engineering degree from the University
CEILING MOUNTED ARTICULATING JIB CRANE
 SECTION 14657 CEILING MOUNTED ARTICULATING JIB CRANE ***** Gorbel, Inc. manufacturers a broad range of material handling cranes including monorail, bridge, gantry, and jib cranes. Numerous work station
SECTION 14657 CEILING MOUNTED ARTICULATING JIB CRANE ***** Gorbel, Inc. manufacturers a broad range of material handling cranes including monorail, bridge, gantry, and jib cranes. Numerous work station
Pneumatic Pipe Crawler
 SUMMARY REPORT Development of Inspection Tools for DST Primary Tanks Date submitted: February 26, 2016 Prepared by: Anthony Abrahao, M.S. Florida International University Collaborators: Erim Gokce, DOE
SUMMARY REPORT Development of Inspection Tools for DST Primary Tanks Date submitted: February 26, 2016 Prepared by: Anthony Abrahao, M.S. Florida International University Collaborators: Erim Gokce, DOE
Introduction to Structural Analysis TYPES OF STRUCTURES LOADS AND
 AND Introduction to Structural Analysis TYPES OF STRUCTURES LOADS INTRODUCTION What is the role of structural analysis in structural engineering projects? Structural engineering is the science and art
AND Introduction to Structural Analysis TYPES OF STRUCTURES LOADS INTRODUCTION What is the role of structural analysis in structural engineering projects? Structural engineering is the science and art
The construction technology of Chongqing Chaotianmen Bridge
 The construction technology of Chongqing Chaotianmen Bridge Zhongfu Xiang School of Civil Engineering & Architectures, Chongqing Jiaotong University, Chongqing, China Wei Xu China zhongtie major bridge
The construction technology of Chongqing Chaotianmen Bridge Zhongfu Xiang School of Civil Engineering & Architectures, Chongqing Jiaotong University, Chongqing, China Wei Xu China zhongtie major bridge
2. WHY SPECIFY A PAVEMENT IN CONCRETE OR IN CONTINUOUS REINFORCED CONCRETE?
 ROUNDABOUTS IN CONTINUOUSLY REINFORCED CONCRETE DESIGN CONSTRUCTION R. Debroux and R. Dumont Service Public de Wallonie, Belgium raymond.debroux@spw.wallonie.be C. Ployaert FEBELCEM, Belgium c.ployaert@febelcem.be
ROUNDABOUTS IN CONTINUOUSLY REINFORCED CONCRETE DESIGN CONSTRUCTION R. Debroux and R. Dumont Service Public de Wallonie, Belgium raymond.debroux@spw.wallonie.be C. Ployaert FEBELCEM, Belgium c.ployaert@febelcem.be
RSA Series Dock Levellers Hinged Lip Suspended Frame. Technical Characteristics nr. 3258
 RSA Series Dock Levellers Hinged Lip Suspended Frame Technical Characteristics nr. 3258 1 European Regulation 1.1 Regulations to be applied to dock levellers Every dock leveller will have to strictly follow
RSA Series Dock Levellers Hinged Lip Suspended Frame Technical Characteristics nr. 3258 1 European Regulation 1.1 Regulations to be applied to dock levellers Every dock leveller will have to strictly follow
IOP Conference Series: Materials Science and Engineering. Related content PAPER OPEN ACCESS
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Preliminary analytical study on the feasibility of using reinforced concrete pile foundations for renewable energy storage by
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Preliminary analytical study on the feasibility of using reinforced concrete pile foundations for renewable energy storage by
COMPONENTS & SOLUTIONS FOR
 COMPONENTS & SOLUTIONS COMPONENTS & SOLUTIONS FOR industrial plants THE TICOMM & PROMACO GROUP Giuseppe Tantardini founded the Ticomm & Promaco group in 1978 to satisfy the demand for anti-corrosive components
COMPONENTS & SOLUTIONS COMPONENTS & SOLUTIONS FOR industrial plants THE TICOMM & PROMACO GROUP Giuseppe Tantardini founded the Ticomm & Promaco group in 1978 to satisfy the demand for anti-corrosive components
THE EXPERIMENTAL STUDY ON INNER SHIFT LINING STRUCTURE OF FREEZING SHAFT IN DEEP THICK AQUIFEROUS SOFT ROCK**
 AGH Journal of Mining and Geoengineering vol. 36 No. 3 2012 Zhishu Yao*, Haiqing Song*, Hua Cheng*, Chuanxin Rong* THE EXPERIMENTAL STUDY ON INNER SHIFT LINING STRUCTURE OF FREEZING SHAFT IN DEEP THICK
AGH Journal of Mining and Geoengineering vol. 36 No. 3 2012 Zhishu Yao*, Haiqing Song*, Hua Cheng*, Chuanxin Rong* THE EXPERIMENTAL STUDY ON INNER SHIFT LINING STRUCTURE OF FREEZING SHAFT IN DEEP THICK
LOADING DOCK SYSTEMS HIGH SPEED DOORS LIFT TABLES DOCK SHELTERS SECTIONAL DOORS COMPL. FOOD INDUSTRY L O A D I N G D O C K S Y S T E M S
 LOADING DOCK SYSTEMS HIGH SPEED DOORS LIFT TABLES DOCK SHELTERS SECTIONAL DOORS COMPL. FOOD INDUSTRY L O A D I N G D O C K S Y S T E M S LOADING DOCK SYSTEMS LOADING DOCK SYSTEMS Loading dock systems enable
LOADING DOCK SYSTEMS HIGH SPEED DOORS LIFT TABLES DOCK SHELTERS SECTIONAL DOORS COMPL. FOOD INDUSTRY L O A D I N G D O C K S Y S T E M S LOADING DOCK SYSTEMS LOADING DOCK SYSTEMS Loading dock systems enable
Recent Developments in Stay Cable Systems
 Recent Developments in Stay Cable Systems PTI Technical Conference, Reno- 2006 Khaled Shawwaf, Technical Director (C) COPYRIGHT POST-TENSIONING INSTITUTE, ALL RIGHT RESERVED Page 1 of 45 * Cable Stayed
Recent Developments in Stay Cable Systems PTI Technical Conference, Reno- 2006 Khaled Shawwaf, Technical Director (C) COPYRIGHT POST-TENSIONING INSTITUTE, ALL RIGHT RESERVED Page 1 of 45 * Cable Stayed
ISBN Verlag Ernst & Sohn - Berlin. Preliminary remarks... VI. 1 Introduction...1
 Seite 1 Inhaltsverzeichnis und Vorwort Structural Bearings ISBN 3-433-01238-5 Verlag Ernst & Sohn - Berlin Contents Preface...V Preliminary remarks... VI 1 Introduction...1 1.1 History...1 1.2 Terms and
Seite 1 Inhaltsverzeichnis und Vorwort Structural Bearings ISBN 3-433-01238-5 Verlag Ernst & Sohn - Berlin Contents Preface...V Preliminary remarks... VI 1 Introduction...1 1.1 History...1 1.2 Terms and
SECTION VIBRATION CONTROLS FOR PLUMBING PIPING AND EQUIPMENT
 Page 220548-1 SECTION 220548 - PART 1 - GENERAL 1.1 RELATED DOCUMENTS A. Drawings and general provisions of the Contract, including General and Supplementary Conditions and Division 01 Specification Sections,
Page 220548-1 SECTION 220548 - PART 1 - GENERAL 1.1 RELATED DOCUMENTS A. Drawings and general provisions of the Contract, including General and Supplementary Conditions and Division 01 Specification Sections,
The Kodiak 3200 Seating System by Royal Stewart Ltd.:
 The Kodiak 3200 Seating System by Royal Stewart Ltd.: PART 1 GENERAL 1.01 Summary A. Bleacher System shall be Series 3200 Platforms as manufactured by Royal Stewart Ltd., Winnipeg, Manitoba, in accordance
The Kodiak 3200 Seating System by Royal Stewart Ltd.: PART 1 GENERAL 1.01 Summary A. Bleacher System shall be Series 3200 Platforms as manufactured by Royal Stewart Ltd., Winnipeg, Manitoba, in accordance
easy formwork system
 easy formwork system Ponteggi Edilponte S.p.A. was created in 1963 in a small building in Povegliano Veronese. Thanks to the experience acquired in more than 40 years of activity in the national and international
easy formwork system Ponteggi Edilponte S.p.A. was created in 1963 in a small building in Povegliano Veronese. Thanks to the experience acquired in more than 40 years of activity in the national and international
MK SYSTEM. // Pieces that can be easily assembled with minimal tools. Numerous configurations with standard components
 MK SYSTEM Numerous configurations with standard components // Pieces that can be easily assembled with minimal tools // Table of contents Product description MK Systems Basic components MK SYSTEM product
MK SYSTEM Numerous configurations with standard components // Pieces that can be easily assembled with minimal tools // Table of contents Product description MK Systems Basic components MK SYSTEM product
A few tips to be sure that rolling windtowers becomes a profitable business. (Pictures and Video are courtesy of EWP Sweden)
") A few tips to be sure that rolling windtowers becomes a profitable business. (Pictures and Video are courtesy of EWP Sweden) Manufacturing Towers: Power generation by means of wind energy is a well-known
A few tips to be sure that rolling windtowers becomes a profitable business. (Pictures and Video are courtesy of EWP Sweden) Manufacturing Towers: Power generation by means of wind energy is a well-known
STRENGTH OF PLATES OF RECTANGULAR INDUSTRIAL DUCTS
 Available online at www.sciencedirect.com Procedia Engineering 14 (2011) 622 629 The Twelfth East Asia-Pacific Conference on Structural Engineering and Construction STRENGTH OF PLATES OF RECTANGULAR INDUSTRIAL
Available online at www.sciencedirect.com Procedia Engineering 14 (2011) 622 629 The Twelfth East Asia-Pacific Conference on Structural Engineering and Construction STRENGTH OF PLATES OF RECTANGULAR INDUSTRIAL
Static Response of Reinforced Soil Retaining Walls with Modular Block Facing
 Static Response of Reinforced Soil Retaining Walls with Modular Block Facing Morteza Sabet 1, Amir M. Halabian 2, Kazem Barkhordari 3 1 Graduate Student, Department of Civil Engineering, Yazd University
Static Response of Reinforced Soil Retaining Walls with Modular Block Facing Morteza Sabet 1, Amir M. Halabian 2, Kazem Barkhordari 3 1 Graduate Student, Department of Civil Engineering, Yazd University
The Flexible Taper Transitions for an In-Vacuum Undulator
 The Flexible Taper Transitions for an In-Vacuum Undulator Rudolf Reiser, # Saša Zelenika, # Gerhard Ingold, # Andreas Keller, # Lothar Schulz #, Toru Hara * and Hideo Kitamura * Abstract # Paul Scherrer
The Flexible Taper Transitions for an In-Vacuum Undulator Rudolf Reiser, # Saša Zelenika, # Gerhard Ingold, # Andreas Keller, # Lothar Schulz #, Toru Hara * and Hideo Kitamura * Abstract # Paul Scherrer
Name of the Lab Course (Basic Structural Analysis Lab)
") Lebanese University Faculty of Engineering II LAB Civil Engineering Department Name of the Lab Course (Basic Structural Analysis Lab) Instructors: Wassim Elias, M2R. Civil Eng. Youssef Kassouf, Civil Eng.
Lebanese University Faculty of Engineering II LAB Civil Engineering Department Name of the Lab Course (Basic Structural Analysis Lab) Instructors: Wassim Elias, M2R. Civil Eng. Youssef Kassouf, Civil Eng.
Pneumatic Valve Islands. Fieldbus & Multipol
 Pneumatic Valve Islands Fieldbus & Multipol Dependable control solutions for each and every project Whether you re looking to automate a simple machine or a complex plant area, you need components that
Pneumatic Valve Islands Fieldbus & Multipol Dependable control solutions for each and every project Whether you re looking to automate a simple machine or a complex plant area, you need components that
Structural Characteristics of New Composite Girder Bridge Using Rolled Steel H-Section
 Proc. Schl. Eng. Tokai Tokai Univ., Univ., Ser. ESer. E 41 (2016) (2016) - 31-37 Structural Characteristics of New Composite Girder Bridge Using Rolled Steel H-Section by Mohammad Hamid ELMY *1 and Shunichi
Proc. Schl. Eng. Tokai Tokai Univ., Univ., Ser. ESer. E 41 (2016) (2016) - 31-37 Structural Characteristics of New Composite Girder Bridge Using Rolled Steel H-Section by Mohammad Hamid ELMY *1 and Shunichi
1514. Structural behavior of concrete filled carbon fiber reinforced polymer sheet tube column
 1514. Structural behavior of concrete filled carbon fiber reinforced polymer sheet tube column Kyoung Hun Lee 1, Heecheul Kim 2, Jaehong Kim 3, Young Hak Lee 4 1 Provincial Fire and Disaster Headquarters,
1514. Structural behavior of concrete filled carbon fiber reinforced polymer sheet tube column Kyoung Hun Lee 1, Heecheul Kim 2, Jaehong Kim 3, Young Hak Lee 4 1 Provincial Fire and Disaster Headquarters,