EE5110/6110 Special Topics in Automation and Control
|
|
|
- Marsha Wheeler
- 5 years ago
- Views:
Transcription

1 EE5110/6110 Special Topics in Automation and Control Introduction to Unmanned Aerial Vehicles Ben M. Chen Professor & Provost s Chair Department of Electrical & Computer Engineering Office: E , Phone: bmchen@nus.edu.sg



2 Outline of the notes Introduction to drones and applications o Types of drones o Applications o NUS UAV research highlights Overall structure of unmanned systems o Communication unit o Ground control systems Internal structure of unmanned systems o Avionic systems o Dynamic modeling o Flight control systems o Measurement systems o Path planning o Trajectory generation o Mission management EE5110/EE6110 ~ 2
3 Continuous assessments EE5110 EE5110 students are required to propose a technical solution for small scale UAVs to navigate in a GPS denied unknown environments, such as indoor and urban canyon. Considerations include the constrains of the UAV platforms, such as maximum payload, onboard computation resources, power consumption and communication bandwidth. The specification of the UAV will be provided. A technical report is expected to explain the solution. It should include the literature review, basic ideas, proof of concept and discussion. EE6110 EE6110 students are required to finish a project to simulate navigation and control of a UAV in an indoor environment without GPS by using MATLAB or a robotics related simulation system, such as ROS. The dynamics model of the UAV will be provided in MATLAB and C++ together with the required indoor environment. The students can build the environment and place artificial markers in the environment by themselves. EE5110/EE6110 ~ 3
 is an aircraft that is equipped with")

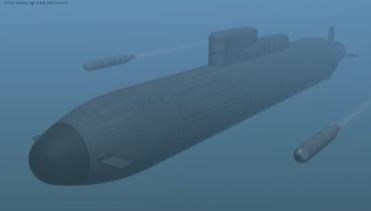
4 What is a drone or UAV? An unmanned aerial vehicle (UAV or drone) is an aircraft that is equipped with necessary data processing units, sensors, automatic control, and communications systems and is capable of performing autonomous flight missions without the interference of a human pilot A drone? EE5110/EE6110 ~ 4




5 Drone types Fixed wing UAVs EE5110/EE6110 ~ 5




6 Drone types Flapping wing UAVs EE5110/EE6110 ~ 6




7 Drone types Rotorcraft UAVs EE5110/EE6110 ~ 7






8 Drone types Hybrid UAVs EE5110/EE6110 ~ 8




9 Drone applications GPS based environments Search & rescue Surveillance & patrolling Forestation & agriculture Aerial mapping EE5110/EE6110 ~ 9




10 Drone applications GPS based environments Mining Oil industry Policing Aerial filming EE5110/EE6110 ~ 10

11 Drone applications GPS denied environments Urban canyon & inside forest Indoor Tunnels Under bridges EE5110/EE6110 ~ 11

12 Drone industry Market sectors Sensors Autopilots OEM Propulsion Operators & Service Navigation Data Handling Data Links Military Research/education Mining Forestry Power & pipeline Media Real estate Agriculture Policing Film industry Oil & gas industry Ports Entertainment EE5110/EE6110 ~ 12






13 NUS research team & unmanned systems platforms EE5110/EE6110 ~ 13
14 NUS unmanned systems research highlights Indoor Navigation & Control Firefighting Inside Forest Navigation NUS ALL Hit and Run in UAVs Flight Formation ONE Micro UAV hit & run UAV Hybrid UAVs Cargo Transportation UAV Calligraphy EE5110/EE6110 ~ 14




15 Awards won by NUS research team DARPA UAVForge Finalist 2012 WCICA Best Paper Award CCC Guan Zhaozhi Prize IMAV nd Place IMAV 2014 Champion EE5110/EE6110 ~ 15











16 Overall structure of unmanned systems UAV UGV Onboard System Onboard System USV Ground Control System UUV EE5110/EE6110 ~ 16
17 Ground control systems Online touch screen path planning on the map Command window to issue real time commands EE5110/EE6110 ~ 17
18 Communication unit The communication units in the UAV system framework are deployed as interfaces between the UAV entity itself and external entities. The external entity can be the GCS for the ground operator, or another UAV entity for information exchange. With UAV to GCS communications, the operator can remotely control and monitor UAVs in operation. With inter UAV communications, the UAV team can multiply their capability and effectiveness in cooperative tasks. Decentralized Control Centralized Control EE5110/EE6110 ~ 18





19 Internal structure of unmanned systems UAV Indoor Inspection UGV USV Powerline Inspection Mission Management An unmanned system Path Planning Trajectory Generation Outer Loop Control Inner Loop Control Measured Signal EE5110/EE6110 ~ 19


20 Hardware components & avionic systems An NUS made micro quadrotor An NUS made avionic system Mission Management Hardware Platform Path Planning Trajectory Generation Outer Loop Control Inner Loop Control Measured Signal EE5110/EE6110 ~ 20




21 Essential hardware components of unmanned systems GPS/AHRS Sonar Sensors Avionics Primary Computer (Task Management & Flight Control) Other Sensors LIDAR Vision Secondary Computer Actuator Management Decode Encode Power System Inter Vehicle Communication High Bandwidth Long Range RC Receiver Actuator Other UAVs Ground Control Station Human Operator Control Surfaces Objects & environments EE5110/EE6110 ~ 21

22 Hierarchy of an avionic system EE5110/EE6110 ~ 22

23 Component breakdown of a typical multi rotor UAV EE5110/EE6110 ~ 23






24 Multi rotor UAV platforms BlackLion 168 BlackLion 068 K Lion EE5110/EE6110 ~ 24




25 Dynamics modeling of a quadrotor UAV Mission Management Aerial Vehicle Path Planning Trajectory Generation Outer Loop Control Inner Loop Control Measured Signal EE5110/EE6110 ~ 25

26 Dynamics model structure of the aerial vehicle Force Velocity Position Moment Euler angles Angular Velocity ail ele thr rud aileron input elevator input collective pitch input rudder input EE110/EE6110 ~ 26
27 Linearized model of the aerial vehicle With some appropriate simplifications, we can obtain a simplified linear model for a quadrotor UAV as follows 1, 2, 3, 4 are respectively the motor angular speeds and is a constant matrix related to motor properties. g is the gravity constant, m is the UAV mass. EE5110/EE6110 ~ 27
28 Flight control systems Due to the nature of the time scale of the aircraft dynamics, i.e., the attitude response is much faster compared to that of the position and velocity, it is a common practice to separate the flight control system into two parts, i.e., the inner loop and the outer loop control. More specifically, Inner loop control system is to guarantee the stability of the aircraft attitude; and Outer loop control system is to control the aircraft position and velocity. Mission Management Path Planning Trajectory Generation Outer Loop Control Inner Loop Control Measured Signal EE5110/EE6110 ~ 28
29 A brief view on the development of control techniques Classical control PID control, developed in 1940s and used heavily for in industrial processes. Optimal control Linear quadratic regulator control, Kalman filter, H 2 control, developed in 1960s to achieve certain optimal performance. Robust control H control, developed in 1980s & 90s to handle systems with uncertainties and disturbances and with high performances. Nonlinear control Still on going research topics, developed to handle nonlinear systems with high performances. Intelligent control Knowledge based control, adaptive control, neural and fuzzy control, etc., developed to handle systems with unknown models. EE5110/EE6110 ~ 29
 and External positioning systems GPS Beidou VICON UWB")

30 Measurement signals Measurement comes from inertial sensors (gyroscope, accelerometer, magnetometer) and External positioning systems GPS Beidou VICON UWB or Internal sensor systems Vision LiDAR Radar Sonar Mission Management Path Planning Trajectory Generation Outer Loop Control Inner Loop Control Measured Signal EE5110/EE6110 ~ 30
 of a moving object without the need for external references.")
31 Inertial navigation system (INS) An inertial navigation system (INS) is a navigation aid that uses a computer, motion sensors (accelerometers) and rotation sensors (gyroscopes) to continuously calculate via dead reckoning the position, orientation, and velocity (direction and speed of movement) of a moving object without the need for external references. It is used on vehicles such as ships, aircraft, submarines, guided missiles, and spacecraft. Other terms used to refer to inertial navigation systems or closely related devices include inertial guidance system, inertial instrument, inertial measurement unit (IMU). An INS is capable of providing the following information of unmanned vehicles: Accelerations Velocities Rotating angles Heading angles EE5110/EE6110 ~ 31
32 Global positioning system (GPS) The Global Positioning System (GPS) is a space based radio navigation system owned by the US Government and operated by the US Air Force. It is a global navigation satellite system that provides geolocation and time information to a GPS receiver in all weather conditions, anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites. The GPS system provides critical positioning capabilities to all users around the world. GPS is widely used by drones for outdoor applications nowadays. The incorporation of GPS receivers in drones allows for waypoint navigation. It allows a drone to autonomously fly to pre programmed points, can instruct the drone how fast, how high, and where to fly. EE5110/EE6110 ~ 32



33 VICON: A motion capture positioning system Here is a link to YouTube for a tutorial on VICON EE5110/EE6110 ~ 33



34 Sensor based positioning systems SLAM Vision based 3D Dense SLAM LiDAR based 2D SLAM EE5110/EE6110 ~ 34
35 Topological SLAM techniques List of topological SLAM methods and their features/associated extraction algorithms Line extractor (LiDAR) Split & merge, expectation maximization, Hough transform, RANdom Sample Consensus Haar wavelets (Vision) Fourier transform similar approach Edge based detector (Vision) Keypoint detectors Blob Detectors: Scale Invariant Feature Transform (SIFT), Speeded Up Robust Features (SURF), Center Surround Extremas (SenSurE) Other Detectors: corner (KLT) Fingerprint of places FACT, DP FACT Affine covariant region detector Harris affine, Maximally Stable Extremal Regions (MSER) Bayesian surprise EE5110/EE6110 ~ 35
36 Path planning Mission Management Path Planning Trajectory Generation Outer Loop Control Inner Loop Control Measured Signal EE5110/EE6110 ~ 36


, and uncertainty (e.")
37 Motion planning Motion planning (also known as the navigation problem) is a term used in robotics or unmanned systems in general for the process of breaking down a desired movement task into discrete motions that satisfy movement constraints and possibly optimize some aspect of the movement, such as time and/or energy. For example, consider navigating a UAV inside a room. The system should execute this task while avoiding walls and not hit the poles placed in the room. A motion planning algorithm would take a description of these tasks as input, and produce the speed and turning commands sent to the drone. It might address issues related to multiple UAVs, more complex tasks, different constraints (e.g., velocity, acceleration, heading), and uncertainty (e.g. imperfect models of the environment or UAV). Motion planning algorithms are widely used for ground robotic systems. EE5110/EE6110 ~ 37
38 Motion planning Motion planning is to search an appropriate path for unmanned vehicles that would allow the vehicles to travel safely and efficiently among obstacles. It consists of two parts: the geometrical path planning and the trajectory generation or optimization. The path planning is done in the configuration space with all dynamics of the vehicles being ignored. This covers a lot of classical problems such as the piano mover s problem. The trajectory generation is the process of designing a trajectory that minimizes (or maximizes) some measure of performance while satisfying a set of constraints of the dynamic model of the unmanned vehicles. Generally speaking, trajectory generation or optimization is a technique for computing an open loop solution to an optimal control problem. It is often used for systems where computing the full closed loop solution is either impossible or impractical. EE5110/EE6110 ~ 38
39 Other path planning search techniques Dijkstra s algorithm: Classic graph searching algorithm originated from dynamic programming R* algorithm: Optimized based on A* which depends less on the heuristic function D* lite algorithm: An incremental planning algorithm, build to handle a dynamic changing and unknown environment JPS algorithm: Jumping point search algorithm an improved version of A*, created to handle the unnecessary zig zag created by standard A* algorithm PRM: Probability roadmap, using random sampling to created connected graph, then use traditional graph search method to generate the map RRT: Rapidly exploring random tree, combine the sampling and searching in the same algorithm, however it does not guarantee an optimal solution RRT*: An improved version of RRT, guarantee an optimal solution BIT*: Batch informed trees, a combination of random sampling algorithm with the A* algorithm EE5110/EE6110 ~ 39

40 Trajectory generation Mission Management Path Planning Trajectory Generation Outer Loop Control Inner Loop Control Measured Signal EE5110/EE6110 ~ 40

 in a quadrotor drone?")
41 Trajectory generation for quadrotor drones With the A* algorithm, we are able to obtain a series of connected line segments shown as in the figures below The next question one would ask: How can these line segments be realized (or used to guide) in a quadrotor drone? EE5110/EE6110 ~ 41
42 Trajectory generation for quadrotor drones For a quadrotor drone to follow closely a pre planned path, we need to specify a set of references to the outer loop controller as depicted in the general unmanned system framework. For drones, the reference set should consist of the vehicle s 3 axis position references, x, y, z 3 axis velocity references, v x, v y, v z 3 axis acceleration references, a x, a y, a z There are extra requirements on these references All of the reference signals must be continuous The velocity and acceleration must be limited Some other constraints EE5110/EE6110 ~ 42


43 Trajectory generation for quadrotor drones The simplest way for the vehicle to travel on the segment path is to generate velocity profile along that line segment. For example, red: velocity yellow: acceleration blue: position It is to generate trajectories for the vehicle to travel from A to D. For each line segment A B, B C, C D, a velocity and acceleration profile shown above has to be generated. The problem with this simple approach is that the drone will come to a full stop at the end of each line segment, such as point B and C. EE5110/EE6110 ~ 43
44 Trajectory generation for quadrotor drones How can the drone fly from A D as fast as possible without stops at the interim notes? A possible solution is to switch to the next line segment before it goes into full stop. Step 1: Line segments are generated, vehicle flying towards the end of the 1st line segment. Step 2: Before reaching the 1st end point to stop, switch to travel on the next line segment. Step 3: By repeating the process in Step 2, vehicle could reach its target in a smoother way. The difficulty is on maintaining the continuity of the reference signal for the entire path EE5110/EE6110 ~ 44
45 How to generate smooth trajectories? Trajectory generation techniques suitable for quadrotors Acceleration limited time optimal solution Generate time minimal trajectory, under the velocity and acceleration constraint Jerk limited time optimal solution Time minimal trajectory, under the velocity, acceleration and jerk constraint Polynomial spline based trajectory Generate high quality, energy optimized trajectory, but requires the involving of numerical optimization Dynamic programming A search based trajectory generation method, very powerful for handling complex dynamics EE5110/EE6110 ~ 45
46 Mission management State Machine Automata Deep learning? Mission Management Path Planning Trajectory Generation Outer Loop Control Inner Loop Control Measured Signal EE5110/EE6110 ~ 46
47 Framework of a mission management For a task based mission, we can use a tree based framework. The tasks are organized into a tree and executed in a manner of depth first traversal. Each leaf node task contains only one single action. In other words, executing that leaf node task is equivalent to executing the corresponding action. Task Task Task Task Task Task Task When an event occurs, a new task (event handler) is inserted to the current tree node as a sub tree. Some events require an immediate termination of mission after the event handler is executed (such as LAND once the battery is low). In that case, the remaining tasks are removed from the tree accordingly. Event Event Handler Task Task... Task EE5110/EE6110 ~ 47
48 Acknowledgement Special thanks to the whole NUS UAV Research Group and particularly to Lai Shupeng, Lan Menglu, Lin Feng, Li Kun, Phang Swee King, Tian Hongyu, Li Jiaxin, Wang Kangli for their help in preparing lecture materials EE5110/EE6110 ~ 48

49 That s all, folks! Thank You! EE5110/EE6110 ~ 49
Navigation and Control of Unmanned Aerial Vehicles in GPS Denied Environments
 Navigation and Control of Unmanned Aerial Vehicles in GPS Denied Environments Ben M. Chen Unmanned Systems Research Group, Dept of Electrical & Computer Engineering Control Science Group, Temasek Laboratories
Navigation and Control of Unmanned Aerial Vehicles in GPS Denied Environments Ben M. Chen Unmanned Systems Research Group, Dept of Electrical & Computer Engineering Control Science Group, Temasek Laboratories
Modeling and Control of Small and Mini Rotorcraft UAVs
 Contents 1 Introduction... 1 1.1 What are Unmanned Aerial Vehicles (UAVs) and Micro Aerial Vehicles (MAVs)?... 2 1.2 Unmanned Aerial Vehicles and Micro Aerial Vehicles: Definitions, History,Classification,
Contents 1 Introduction... 1 1.1 What are Unmanned Aerial Vehicles (UAVs) and Micro Aerial Vehicles (MAVs)?... 2 1.2 Unmanned Aerial Vehicles and Micro Aerial Vehicles: Definitions, History,Classification,
Presentation of the Paper. Learning Monocular Reactive UAV Control in Cluttered Natural Environments
 Presentation of the Paper Learning Monocular Reactive UAV Control in Cluttered Natural Environments Stefany Vanzeler Topics in Robotics Department of Machine Learning and Robotics Institute for Parallel
Presentation of the Paper Learning Monocular Reactive UAV Control in Cluttered Natural Environments Stefany Vanzeler Topics in Robotics Department of Machine Learning and Robotics Institute for Parallel
Collaboration Between Unmanned Aerial and Ground Vehicles. Dr. Daisy Tang
 Collaboration Between Unmanned Aerial and Ground Vehicles Dr. Daisy Tang Key Components Autonomous control of individual agent Collaborative system Mission planning Task allocation Communication Data fusion
Collaboration Between Unmanned Aerial and Ground Vehicles Dr. Daisy Tang Key Components Autonomous control of individual agent Collaborative system Mission planning Task allocation Communication Data fusion
AEM 5495 Spring Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs)
") AEM 5495 Spring 2011 Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs) Gary J. Balas balas@umn.edu Monday-Wednesday 3:35-4:50 PM 211 Akerman Hall UAV Course Syllabus
AEM 5495 Spring 2011 Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs) Gary J. Balas balas@umn.edu Monday-Wednesday 3:35-4:50 PM 211 Akerman Hall UAV Course Syllabus
Enhancement of Quadrotor Positioning Using EKF-SLAM
 , pp.56-60 http://dx.doi.org/10.14257/astl.2015.106.13 Enhancement of Quadrotor Positioning Using EKF-SLAM Jae-young Hwang 1,1 and Young-wan Cho 1 1 Dept. of Computer Engineering, Seokyeong University
, pp.56-60 http://dx.doi.org/10.14257/astl.2015.106.13 Enhancement of Quadrotor Positioning Using EKF-SLAM Jae-young Hwang 1,1 and Young-wan Cho 1 1 Dept. of Computer Engineering, Seokyeong University
Executive Summary. Revision chart and history log "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" Contract B-0068-GEM3-GC
 Contract B-0068-GEM3-GC") Project "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" under Contract B-0068-GEM3-GC Executive Summary Period covered: 04.08.09 31.05.10 Issue Date: 30.06.2010 Start date of project: 04.08.09 Duration: 9 months
Project "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" under Contract B-0068-GEM3-GC Executive Summary Period covered: 04.08.09 31.05.10 Issue Date: 30.06.2010 Start date of project: 04.08.09 Duration: 9 months
CHAPTER 1 INTRODUCTION
 1 CHAPTER 1 INTRODUCTION 1.1 INTRODUCTION Unmanned Aerial Vehicles (UAVs) are gaining wide acceptance as tools in various industries, in civil as well as military applications. Many UAV systems are expensive
1 CHAPTER 1 INTRODUCTION 1.1 INTRODUCTION Unmanned Aerial Vehicles (UAVs) are gaining wide acceptance as tools in various industries, in civil as well as military applications. Many UAV systems are expensive
Drone Industry: Opportunities and Challenges. Ertuğrul Çetinsoy, PhD
 Drone Industry: Opportunities and Challenges by Ertuğrul Çetinsoy, PhD 1 Relevance to this topic: Aircraft design for DBF2006 in Turkey UçarSA: 2.5 m wing span, 2 m length, 10 kg weight Electric propulsion
Drone Industry: Opportunities and Challenges by Ertuğrul Çetinsoy, PhD 1 Relevance to this topic: Aircraft design for DBF2006 in Turkey UçarSA: 2.5 m wing span, 2 m length, 10 kg weight Electric propulsion
Landing of a Quadcopter on a Mobile Base using Fuzzy Logic
 Landing of a Quadcopter on a Mobile Base using Fuzzy Logic Patrick Benavidez, Josue Lambert, Aldo Jaimes and Mo Jamshidi, Ph.D., Lutcher Brown Endowed Chair Department of Electrical and Computer Engineering
Landing of a Quadcopter on a Mobile Base using Fuzzy Logic Patrick Benavidez, Josue Lambert, Aldo Jaimes and Mo Jamshidi, Ph.D., Lutcher Brown Endowed Chair Department of Electrical and Computer Engineering
Fixed-Wing Survey Drone. Students:
 Fixed-Wing Survey Drone Functional Description and System Block Diagram Students: Ben Gorgan Danielle Johnson Faculty Advisor: Dr. Joseph A. Driscoll Date: October 1, 2013 Introduction This project will
Fixed-Wing Survey Drone Functional Description and System Block Diagram Students: Ben Gorgan Danielle Johnson Faculty Advisor: Dr. Joseph A. Driscoll Date: October 1, 2013 Introduction This project will
Implementing Consensus based tasks with autonomous agents cooperating in dynamic missions using Subsumption Architecture
 Implementing Consensus based tasks with autonomous agents cooperating in dynamic missions using Subsumption Architecture Prasanna Kolar PhD Candidate, Autonomous Control Engineering Labs University of
Implementing Consensus based tasks with autonomous agents cooperating in dynamic missions using Subsumption Architecture Prasanna Kolar PhD Candidate, Autonomous Control Engineering Labs University of
FORMATION FLIGHT OF FIXED-WING UAVS USING ARTIFICIAL POTENTIAL FIELD
 FORMATION FLIGHT OF FIXED-WING UAVS USING ARTIFICIAL POTENTIAL FIELD Yoshitsugu Nagao*and Kenji Uchiyama* *Department of Aerospace Engineering, Nihon University csyo1217@g.nihon-u.ac.jp, uchiyama@aero.cst.nihon-u.ac.jp
FORMATION FLIGHT OF FIXED-WING UAVS USING ARTIFICIAL POTENTIAL FIELD Yoshitsugu Nagao*and Kenji Uchiyama* *Department of Aerospace Engineering, Nihon University csyo1217@g.nihon-u.ac.jp, uchiyama@aero.cst.nihon-u.ac.jp
EPSRC Centre for Doctoral Training in Industrially Focused Mathematical Modelling
 EPSRC Centre for Doctoral Training in Industrially Focused Mathematical Modelling Swarm Robotics in Bearing-Only Formations Joseph Field Contents 1. Introduction... 2 2. Formulating the Problem... 3 Glossary
EPSRC Centre for Doctoral Training in Industrially Focused Mathematical Modelling Swarm Robotics in Bearing-Only Formations Joseph Field Contents 1. Introduction... 2 2. Formulating the Problem... 3 Glossary
Basic Multicopter Control with Inertial Sensors
 International Journal of Computational Engineering & Management, Vol. 17 Issue 3, May 2014 www..org 53 Basic Multicopter Control with Inertial Sensors Saw Kyw Wai Hin Ko 1, Kyaw Soe Lwin 2 1,2 Department
International Journal of Computational Engineering & Management, Vol. 17 Issue 3, May 2014 www..org 53 Basic Multicopter Control with Inertial Sensors Saw Kyw Wai Hin Ko 1, Kyaw Soe Lwin 2 1,2 Department
Quadcopter See and Avoid Using a Fuzzy Controller
 1 Quadcopter See and Avoid Using a Fuzzy Controller M. A. Olivares-Mendez and Luis Mejias and Pascual Campoy and Ignacio Mellado-Bataller Computer Vision Group, DISAM, Polytechnic University of Madrid
1 Quadcopter See and Avoid Using a Fuzzy Controller M. A. Olivares-Mendez and Luis Mejias and Pascual Campoy and Ignacio Mellado-Bataller Computer Vision Group, DISAM, Polytechnic University of Madrid
Use of UAVs for ecosystem monitoring. Genova, July 20 th 2016
 Use of UAVs for ecosystem monitoring Genova, July 20 th 2016 Roberto Colella colella@ba.issia.cnr.it Unmanned Aerial Vehicle An Unmanned Aerial Vehicle (UAV) is an aircraft without a human pilot onboard.
Use of UAVs for ecosystem monitoring Genova, July 20 th 2016 Roberto Colella colella@ba.issia.cnr.it Unmanned Aerial Vehicle An Unmanned Aerial Vehicle (UAV) is an aircraft without a human pilot onboard.
I. INTRODUCTION II. QUADCOPTER
 Proposed System of Leader-Follower Formation Control of 4-wheeled Mobile Robot and Quadcopter by Using Image Processing of Hybrid Robot Moustafa M. Kurdi Belarusian National Technical University, Minsk,
Proposed System of Leader-Follower Formation Control of 4-wheeled Mobile Robot and Quadcopter by Using Image Processing of Hybrid Robot Moustafa M. Kurdi Belarusian National Technical University, Minsk,
Fixed Wing Survey Drone. Students:
 Fixed Wing Survey Drone Project Proposal Students: Ben Gorgan Danielle Johnson Faculty Advisor: Dr. Joseph A. Driscoll Date: November, 26 2013 1 Project Summary This project will develop an unmanned aerial
Fixed Wing Survey Drone Project Proposal Students: Ben Gorgan Danielle Johnson Faculty Advisor: Dr. Joseph A. Driscoll Date: November, 26 2013 1 Project Summary This project will develop an unmanned aerial
Flight Dynamics and Trajectory Modeling for a Strategic Long-Endurance Solar Unmanned Aircraft
 Flight Dynamics and Trajectory Modeling for a Strategic Long-Endurance Solar Unmanned Aircraft B. M. Albaker, Member, IEEE UMPEDAC Research Centre, University of Malaya Kuala Lumpur, Malaysia baraaalbaker@um.edu.my
Flight Dynamics and Trajectory Modeling for a Strategic Long-Endurance Solar Unmanned Aircraft B. M. Albaker, Member, IEEE UMPEDAC Research Centre, University of Malaya Kuala Lumpur, Malaysia baraaalbaker@um.edu.my
International Journal of Engineering Trends and Technology (IJETT) Volume 23 Number 7- May 2015
 Volume 23 Number 7- May 2015") Effect of Path Planning on Flying Measured Characteristics for Quadcopter Using APM2.6 Controller Wael R. Abdulmajeed #1, Omar A. Athab #2, Ihab A. Sattam #3 1 Lect.Dr, Department of Mechatronics, Al-Khwarizmi
Effect of Path Planning on Flying Measured Characteristics for Quadcopter Using APM2.6 Controller Wael R. Abdulmajeed #1, Omar A. Athab #2, Ihab A. Sattam #3 1 Lect.Dr, Department of Mechatronics, Al-Khwarizmi
S.T.E.M. Integrated Robotics Detailed Outline
 S.T.E.M. Integrated Robotics Detailed Outline Unit 1: An Introduction to Drones Time: 4 Days Lesson 1.1 Introduction to MINDS-i 1. A brief intro of how MINDS-i defines STEM education and STEM Integrated
S.T.E.M. Integrated Robotics Detailed Outline Unit 1: An Introduction to Drones Time: 4 Days Lesson 1.1 Introduction to MINDS-i 1. A brief intro of how MINDS-i defines STEM education and STEM Integrated
Why Math Matters: Rethinking Drone Flight Stability last revised 3/18
 Why Math Matters: Rethinking Drone Flight Stability last revised 3/18 This whitepaper discusses the importance of math in the context of our proprietary Folded Geometry Code (FGC). Digital Aerolus UAVs
Why Math Matters: Rethinking Drone Flight Stability last revised 3/18 This whitepaper discusses the importance of math in the context of our proprietary Folded Geometry Code (FGC). Digital Aerolus UAVs
Autonomous Battery Charging of Quadcopter
 ECE 4901 Fall 2016 Project Proposal Autonomous Battery Charging of Quadcopter Thomas Baietto Electrical Engineering Gabriel Bautista Computer Engineering Ryan Oldham Electrical Engineering Yifei Song Electrical
ECE 4901 Fall 2016 Project Proposal Autonomous Battery Charging of Quadcopter Thomas Baietto Electrical Engineering Gabriel Bautista Computer Engineering Ryan Oldham Electrical Engineering Yifei Song Electrical
APPLICATION OF DECISION TREE ON COLLISION AVOIDANCE SYSTEM DESIGN AND VERIFICATION FOR QUADCOPTER
 APPLICATION OF DECISION TREE ON COLLISION AVOIDANCE SYSTEM DESIGN AND VERIFICATION FOR QUADCOPTER Chun-Wei Chen, Ping-Hsun Hsieh *, Wei-Hsiang Lai Dept. of Aeronautics and Astronautics, National Cheng
APPLICATION OF DECISION TREE ON COLLISION AVOIDANCE SYSTEM DESIGN AND VERIFICATION FOR QUADCOPTER Chun-Wei Chen, Ping-Hsun Hsieh *, Wei-Hsiang Lai Dept. of Aeronautics and Astronautics, National Cheng
RESEARCH ON THE DRONE TECHNOLOGY FOR THE ISS APPLICATION TAI NAKAMURA ASIAN INSTITUTE OF TECHNOLOGY JAPAN AEROSPACE EXPLORATION AGENCY
 RESEARCH ON THE DRONE TECHNOLOGY FOR THE ISS APPLICATION TAI NAKAMURA ASIAN INSTITUTE OF TECHNOLOGY JAPAN AEROSPACE EXPLORATION AGENCY CONTENTS Introduction Proposal of Space Drone Advantage of Drones
RESEARCH ON THE DRONE TECHNOLOGY FOR THE ISS APPLICATION TAI NAKAMURA ASIAN INSTITUTE OF TECHNOLOGY JAPAN AEROSPACE EXPLORATION AGENCY CONTENTS Introduction Proposal of Space Drone Advantage of Drones
A Novel UAV for Interaction with Moving Targets in an Indoor Environment
 A Novel UAV for Interaction with Moving Targets in an Indoor Environment Aaron Miller, Levi Burner, Evan Becker, Ritesh Misra, Andrew Saba, Liam Berti University of Pittsburgh - Robotics and Automation
A Novel UAV for Interaction with Moving Targets in an Indoor Environment Aaron Miller, Levi Burner, Evan Becker, Ritesh Misra, Andrew Saba, Liam Berti University of Pittsburgh - Robotics and Automation
UNMANNED SURFACE VESSEL (USV)
") UNMANNED SURFACE VESSEL (USV) UNMANNED SURFACE VESSEL (USV) By using Arma-Tech Tactical Autonomous Control Kit (ATTACK), the vessel can operate independently or combined in swarm. Completely autonomously
UNMANNED SURFACE VESSEL (USV) UNMANNED SURFACE VESSEL (USV) By using Arma-Tech Tactical Autonomous Control Kit (ATTACK), the vessel can operate independently or combined in swarm. Completely autonomously
Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition
 Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition Feng Guo No.1 Harbin Engineering University, China Peiji Wang No.2 Yuan Yin No.3 Xiaoyan Zheng No.4
Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition Feng Guo No.1 Harbin Engineering University, China Peiji Wang No.2 Yuan Yin No.3 Xiaoyan Zheng No.4
Development of a Comprehensive Software System for Implementing Cooperative Control of Multiple Unmanned Aerial Vehicles
 2009 IEEE International Conference on Control and Automation Christchurch, New Zealand, December 9-11, 2009 FrAT3.6 Development of a Comprehensive Software System for Implementing Cooperative Control of
2009 IEEE International Conference on Control and Automation Christchurch, New Zealand, December 9-11, 2009 FrAT3.6 Development of a Comprehensive Software System for Implementing Cooperative Control of
Research on Obstacle Avoidance System of UAV Based on Multi-sensor Fusion Technology Deng Ke, Hou Xiaosong, Wan Wenjie, Liu Shiyi
 4th International Conference on Electrical & Electronics Engineering and Computer Science (ICEEECS 2016) Research on Obstacle Avoidance System of UAV Based on Multi-sensor Fusion Technology Deng Ke, Hou
4th International Conference on Electrical & Electronics Engineering and Computer Science (ICEEECS 2016) Research on Obstacle Avoidance System of UAV Based on Multi-sensor Fusion Technology Deng Ke, Hou
Index Terms Quadcopter, Unmanned Aerial Vehicle, Radial Basis Function Neural Network. Displacement of x axis ey. Displacement of y axis ez
 Modeling and Control Design of Quad copter Failsafe System Chun-Yi Lin and Wu-Sung Yao Department of Mechanical and Automation Engineering, National Kaohsiung First University of Science and Technology,
Modeling and Control Design of Quad copter Failsafe System Chun-Yi Lin and Wu-Sung Yao Department of Mechanical and Automation Engineering, National Kaohsiung First University of Science and Technology,
Computer Life (CPL) ISSN: Hardware Design and Implementation of a Small UAV Flight Control System
 ISSN: Hardware Design and Implementation of a Small UAV Flight Control System") Computer Life (CPL) ISSN: 1819-4818 Delivering Quality Science to the World Hardware Design and Implementation of a Small UAV Flight Control System Yongzhen Wang 1, a, Qingsong Lin 1, b and Yanchang Li
Computer Life (CPL) ISSN: 1819-4818 Delivering Quality Science to the World Hardware Design and Implementation of a Small UAV Flight Control System Yongzhen Wang 1, a, Qingsong Lin 1, b and Yanchang Li
Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage
 The 2008 ICRA Workshop on Cooperative Control of Multiple Heterogeneous UAVs for Coverage and Surveillance Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage Peng Cheng Jim Keller Vijay
The 2008 ICRA Workshop on Cooperative Control of Multiple Heterogeneous UAVs for Coverage and Surveillance Time-Optimal UAV Trajectory Planning for 3D Urban Structure Coverage Peng Cheng Jim Keller Vijay
Mechatronic systems used in aviation Presenter: Varga Ádám Óbuda University Bánki Donát Faculty of Mechanical & Safety Engineering
 Mechatronic systems used in aviation Presenter: Varga Ádám Óbuda University Bánki Donát Faculty of Mechanical & Safety Engineering Importance of aviation: A lot of people travel by aircraft daily, but
Mechatronic systems used in aviation Presenter: Varga Ádám Óbuda University Bánki Donát Faculty of Mechanical & Safety Engineering Importance of aviation: A lot of people travel by aircraft daily, but
Controlling groups of autonomous systems
 Controlling groups of autonomous systems Claire Tomlin and Shankar Sastry Department of Electrical Engineering and Computer Sciences UC Berkeley Planning operations for teams of aircraft Local objectives:
Controlling groups of autonomous systems Claire Tomlin and Shankar Sastry Department of Electrical Engineering and Computer Sciences UC Berkeley Planning operations for teams of aircraft Local objectives:
Drones In Logistics PRESENTATION TITLE. Alexander Stimpson, Ph.D. Your Logo Goes Here! 2017 MHI Copyright claimed for audiovisual works and
 Drones In Logistics Presented by: Alexander Stimpson, Ph.D. PRESENTATION TITLE Your Logo Goes Here! 2017 MHI Copyright claimed for audiovisual works and Outline Introduction The Nature of Drones Drone
Drones In Logistics Presented by: Alexander Stimpson, Ph.D. PRESENTATION TITLE Your Logo Goes Here! 2017 MHI Copyright claimed for audiovisual works and Outline Introduction The Nature of Drones Drone
Realistic Models for Characterizing the Performance of Unmanned Aerial Vehicles
 Realistic Models for Characterizing the Performance of Unmanned Aerial Vehicles Ken Goss, Riccardo Musmeci, Simone Silvestri National Science Foundation NSF Funded Missouri Transect Science for Peace and
Realistic Models for Characterizing the Performance of Unmanned Aerial Vehicles Ken Goss, Riccardo Musmeci, Simone Silvestri National Science Foundation NSF Funded Missouri Transect Science for Peace and
monitoring it i volcanic gas sampling and analysis
 Volcan, an autonomous volcanic gas sampling Unmanned Aerial Vehicle outbreak of a crisis: identification of causes and effects,, rescue coordination,, first aid volcanic area surveillance and monitoring
Volcan, an autonomous volcanic gas sampling Unmanned Aerial Vehicle outbreak of a crisis: identification of causes and effects,, rescue coordination,, first aid volcanic area surveillance and monitoring
International Journal of Computer Engineering and Applications, Volume XII, Special Issue, May 18, ISSN
 International Journal of Computer Engineering and Applications, Volume XII, Special Issue, May 18, www.ijcea.com ISSN 2321-3469 UAV AND UGV STATE-BASED BEHAVIORAL FORMATION CONTROL FOR LANDMINE OPERATIONS
International Journal of Computer Engineering and Applications, Volume XII, Special Issue, May 18, www.ijcea.com ISSN 2321-3469 UAV AND UGV STATE-BASED BEHAVIORAL FORMATION CONTROL FOR LANDMINE OPERATIONS
Autonomous Battery Charging of Quadcopter
 ECE 4901 Fall 2016 Final Report Autonomous Battery Charging of Quadcopter Team 1722: Thomas Baietto Electrical Engineering Gabriel Bautista Computer Engineering Ryan Oldham Electrical Engineering Yifei
ECE 4901 Fall 2016 Final Report Autonomous Battery Charging of Quadcopter Team 1722: Thomas Baietto Electrical Engineering Gabriel Bautista Computer Engineering Ryan Oldham Electrical Engineering Yifei
Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018
 24/09/2018 Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018 Most of the connectors used in the small, hand-launched military UAVs typical of swarming drones
24/09/2018 Swarming UAVs Demand the Smallest Mil/Aero Connectors by Contributed Article on August 21, 2018 Most of the connectors used in the small, hand-launched military UAVs typical of swarming drones
Military and Commercial Drones: -- Markets Reach $16.1 Billion By 2021
 Military and Commercial Drones: -- Markets Reach $16.1 Billion By 2021 LEXINGTON, Massachusetts (July 30, 2015) WinterGreen Research announces that it has published a new study Drones: Trains, Planes,
Military and Commercial Drones: -- Markets Reach $16.1 Billion By 2021 LEXINGTON, Massachusetts (July 30, 2015) WinterGreen Research announces that it has published a new study Drones: Trains, Planes,
Abhyast Phase V Semi-Autonomous Aerial Vehicle Design
 25-03-15 Abhyast Phase V Semi-Autonomous Aerial Vehicle Design Boeing-IITK Joint Venture Project Team Members Elle Atma Vidhya Prakash (eprakash@iitk.ac.in) Rahul Gujar (rahugur@iitk.ac.in) Preksha Gupta
25-03-15 Abhyast Phase V Semi-Autonomous Aerial Vehicle Design Boeing-IITK Joint Venture Project Team Members Elle Atma Vidhya Prakash (eprakash@iitk.ac.in) Rahul Gujar (rahugur@iitk.ac.in) Preksha Gupta
Collaborative Control of Unmanned Air Vehicles Concentration
 Collaborative Control of Unmanned Air Vehicles Concentration Stochastic Dynamic Programming and Operator Models for UAV Operations Anouck Girard August 29, 2007 Overview of C 2 UAV Concentration Team:
Collaborative Control of Unmanned Air Vehicles Concentration Stochastic Dynamic Programming and Operator Models for UAV Operations Anouck Girard August 29, 2007 Overview of C 2 UAV Concentration Team:
Common FAA and UAS Terms
 Common FAA and UAS Terms FAA- Federal Aviation Administration From their website: Summary of Activities We're responsible for the safety of civil aviation. The Federal Aviation Act of 1958 created the
Common FAA and UAS Terms FAA- Federal Aviation Administration From their website: Summary of Activities We're responsible for the safety of civil aviation. The Federal Aviation Act of 1958 created the
FIGHTER QUADCOPTER CONTROL USING COMPUTER SYSTEM
 FIGHTER QUADCOPTER CONTROL USING COMPUTER SYSTEM Prof.S.V.Phulari, Kumar Kawale, Supriya Kolhe, Gouri Katale, Dhanashri Hemane, P.D.E.A s College of Engineering, Manjari(Bk), Pune sv_phulari@yahoo.com,
FIGHTER QUADCOPTER CONTROL USING COMPUTER SYSTEM Prof.S.V.Phulari, Kumar Kawale, Supriya Kolhe, Gouri Katale, Dhanashri Hemane, P.D.E.A s College of Engineering, Manjari(Bk), Pune sv_phulari@yahoo.com,
Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions
 Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions Allison Ryan July 22, 2004 The AINS Center for the Collaborative Control of Unmanned Vehicles 1 US Coast Guard Search and Rescue
Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions Allison Ryan July 22, 2004 The AINS Center for the Collaborative Control of Unmanned Vehicles 1 US Coast Guard Search and Rescue
Position Control of an Unmanned Aerial Vehicle From a Mobile Ground Vehicle
 Michigan Technological University Digital Commons @ Michigan Tech Dissertations, Master's Theses and Master's Reports 2017 Position Control of an Unmanned Aerial Vehicle From a Mobile Ground Vehicle Astha
Michigan Technological University Digital Commons @ Michigan Tech Dissertations, Master's Theses and Master's Reports 2017 Position Control of an Unmanned Aerial Vehicle From a Mobile Ground Vehicle Astha
Will the organizers provide a 3D mock-up of the arena? Draft indicative 2D layout of the Arena is given in Appendix 1. This will be finalized soon.
 GENERAL QUESTIONS When will the organizers publish the details of the communications network to be used during the competition? Details of the communication network can be find at http://www.mbzirc.com/challenge
GENERAL QUESTIONS When will the organizers publish the details of the communications network to be used during the competition? Details of the communication network can be find at http://www.mbzirc.com/challenge
Path- and data transmission planning for cooperating UAVs in delay tolerant network
 1 Path- and data transmission planning for cooperating UAVs in delay tolerant network Esten Ingar Grøtli, Tor Arne Johansen Esten Ingar Grøtli, WiUAV, Anaheim, 07.12.2012 2 Outline Related work Applications
1 Path- and data transmission planning for cooperating UAVs in delay tolerant network Esten Ingar Grøtli, Tor Arne Johansen Esten Ingar Grøtli, WiUAV, Anaheim, 07.12.2012 2 Outline Related work Applications
Custom Small UAV Lab. To: Dr. Lewis Ntaimo ISEN
 Custom Small UAV Lab To: Dr. Lewis Ntaimo ISEN 689-601 From: Gerardo Iglesias, Sugiri Halim, William, Zane Singleton March 20, 2008 I. Statement of Problem Current development and research in the field
Custom Small UAV Lab To: Dr. Lewis Ntaimo ISEN 689-601 From: Gerardo Iglesias, Sugiri Halim, William, Zane Singleton March 20, 2008 I. Statement of Problem Current development and research in the field
Swarm-Copters Senior Design Project: Simulating UAV Swarm Networks Using Quadcopters for Search and Rescue Applications
 Swarm-Copters Senior Design Project: Simulating UAV Swarm Networks Using Quadcopters for Search and Rescue Applications Author: Mark Moudy Faculty Mentors: Kamesh Namuduri, Department of Electrical Engineering,
Swarm-Copters Senior Design Project: Simulating UAV Swarm Networks Using Quadcopters for Search and Rescue Applications Author: Mark Moudy Faculty Mentors: Kamesh Namuduri, Department of Electrical Engineering,
Requirements Specification
 Autonomous Minesweeper 206-2-2 Editor: Erik Bodin Version.3 Status Reviewed Erik Bodin 206-0-07 Approved Martin Lindfors 206-09-23 TSRT0 Page tsrt0-balrog@googlegroups.com Autonomous Minesweeper 206-2-2
Autonomous Minesweeper 206-2-2 Editor: Erik Bodin Version.3 Status Reviewed Erik Bodin 206-0-07 Approved Martin Lindfors 206-09-23 TSRT0 Page tsrt0-balrog@googlegroups.com Autonomous Minesweeper 206-2-2
History. Also known as quadrotors First flying quadrotor: 11 November 1922 Etienne Oehmichen. Image: blogger.com
 Quadcopters History Also known as quadrotors First flying quadrotor: 11 November 1922 Etienne Oehmichen Image: blogger.com History Quadrotors overtaken by helicopters due to workload of the pilot. Some
Quadcopters History Also known as quadrotors First flying quadrotor: 11 November 1922 Etienne Oehmichen Image: blogger.com History Quadrotors overtaken by helicopters due to workload of the pilot. Some
REMOTELY OPERATED AERIAL SURVEILLANCE SYSTEM TRIBHUVAN UNIVERSITY
 A STUDY ON REMOTELY OPERATED AERIAL SURVEILLANCE SYSTEM BY HARI BHUSAL TRIBHUVAN UNIVERSITY INSTITUTE OF ENGINEERING PASCHIMANCHAL CAMPUS POKHARA, NEPAL 2013-2014 1 Abstract With the advancement in Science
A STUDY ON REMOTELY OPERATED AERIAL SURVEILLANCE SYSTEM BY HARI BHUSAL TRIBHUVAN UNIVERSITY INSTITUTE OF ENGINEERING PASCHIMANCHAL CAMPUS POKHARA, NEPAL 2013-2014 1 Abstract With the advancement in Science
Simulation based design & development of autonomous underwater vehicle IMGAM
 Simulation based design & development of autonomous underwater vehicle IMGAM Dr. Ing. Max Abildgaard a sound decision The ATLAS ELEKTRONIK Group/ 1 Introduction IMGAM (Intelligentes Monitoring von Gasaustritten
Simulation based design & development of autonomous underwater vehicle IMGAM Dr. Ing. Max Abildgaard a sound decision The ATLAS ELEKTRONIK Group/ 1 Introduction IMGAM (Intelligentes Monitoring von Gasaustritten
Oberon-based Autopilots for Unmanned Aerial Vehicles
 Oberon-based Autopilots for Unmanned Aerial Vehicles Jacques Chapuis wecontrol AG Air Force Center Überlandstrasse 255 CH-8600 Dübendorf http://www.wecontrol.ch 1 Outline I. Introduction to wecontrol II.
Oberon-based Autopilots for Unmanned Aerial Vehicles Jacques Chapuis wecontrol AG Air Force Center Überlandstrasse 255 CH-8600 Dübendorf http://www.wecontrol.ch 1 Outline I. Introduction to wecontrol II.
DRONE REPRESENTATION...
 REALISTIC DRONE A project by AnanasProject Content INTRODUCTION... 1 OBJECTIVES... 1 PROJECT STRUCTURE... 1 DRONE REPRESENTATION... 2 SENSORS... 2 LAYER 0: STABILIZATION... 3 FLYING PRINCIPLES... 3 PID
REALISTIC DRONE A project by AnanasProject Content INTRODUCTION... 1 OBJECTIVES... 1 PROJECT STRUCTURE... 1 DRONE REPRESENTATION... 2 SENSORS... 2 LAYER 0: STABILIZATION... 3 FLYING PRINCIPLES... 3 PID
Potential for Using Unmanned Aerial Vehicles (UAV) in an On-Site Inspection
 in an On-Site Inspection") Potential for Using Unmanned Aerial Vehicles (UAV) in an On-Site Inspection Dr James Palmer AWE plc, UK CTBTO Science and Technology Conference 2015 T3.2-06 What is an Unmanned Aerial Vehicle? Different
Potential for Using Unmanned Aerial Vehicles (UAV) in an On-Site Inspection Dr James Palmer AWE plc, UK CTBTO Science and Technology Conference 2015 T3.2-06 What is an Unmanned Aerial Vehicle? Different
2017 SUNY TYESA Mini UAV Competition Friday, May 5, 2017 Monroe Community College, Rochester NY
 V 2017 SUNY TYESA Mini UAV Competition Friday, May 5, 2017 Monroe Community College, Rochester NY Project Teams of sophomore and freshman students will design, build, and pilot a mini Unmanned Aerial Vehicle
V 2017 SUNY TYESA Mini UAV Competition Friday, May 5, 2017 Monroe Community College, Rochester NY Project Teams of sophomore and freshman students will design, build, and pilot a mini Unmanned Aerial Vehicle
Embedded Real-Time Software Architecture for Unmanned Autonomous Helicopters
 JOURNAL OF SEMICONDUCTOR TECHNOLOGY AND SCIENCE, VOL.5, NO.4, DECEMBER, 2005 243 Embedded Real-Time Software Architecture for Unmanned Autonomous Helicopters Won Eui Hong, Jae-Shin Lee, Laxmisha Rai, and
JOURNAL OF SEMICONDUCTOR TECHNOLOGY AND SCIENCE, VOL.5, NO.4, DECEMBER, 2005 243 Embedded Real-Time Software Architecture for Unmanned Autonomous Helicopters Won Eui Hong, Jae-Shin Lee, Laxmisha Rai, and
Representing Autonomous Systems Self-Confidence through Competency Boundaries
 Representing Autonomous Systems Self-Confidence through Competency Boundaries Andrew R. Hutchins, M. L. Cummings Humans and Autonomy Laboratory, Duke University, Durham, NC, USA Mark Draper Supervisory
Representing Autonomous Systems Self-Confidence through Competency Boundaries Andrew R. Hutchins, M. L. Cummings Humans and Autonomy Laboratory, Duke University, Durham, NC, USA Mark Draper Supervisory
Decentralized Control Architecture for UAV-UGV Cooperation
 Decentralized Control Architecture for UAV- Cooperation El Houssein Chouaib Harik, François Guérin, Frédéric Guinand, Jean-François Brethé, Hervé Pelvillain To cite this version: El Houssein Chouaib Harik,
Decentralized Control Architecture for UAV- Cooperation El Houssein Chouaib Harik, François Guérin, Frédéric Guinand, Jean-François Brethé, Hervé Pelvillain To cite this version: El Houssein Chouaib Harik,
Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System
 Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System Randall Foudray, Jiayi Liu, Erik Kaitfors, Jordan Ritz South Dakota School of Mines and Technology
Design and Development of South Dakota School of Mines and Technology s Aerial Robotic Reconnaissance System Randall Foudray, Jiayi Liu, Erik Kaitfors, Jordan Ritz South Dakota School of Mines and Technology
Intro to Small Unmanned Aircraft Systems & Recreational Drones
 Intro to Small Unmanned Aircraft Systems & Recreational Drones Room Assignments Tuesday & Thursday Room 112 Neal Leeper nleeper@cfu.net www.nleeper.com/drone Class Introduction What is your Name? Do
Intro to Small Unmanned Aircraft Systems & Recreational Drones Room Assignments Tuesday & Thursday Room 112 Neal Leeper nleeper@cfu.net www.nleeper.com/drone Class Introduction What is your Name? Do
Solutions.
 Products Services Software Platforms Data Intelligence Solutions www.autonomoustuff.com About AutonomouStuff Innovative Products www.autonomoustuff.com/products AutonomouStuff is the world s leader in
Products Services Software Platforms Data Intelligence Solutions www.autonomoustuff.com About AutonomouStuff Innovative Products www.autonomoustuff.com/products AutonomouStuff is the world s leader in
Artificial Intelligence applied for electrical grid inspection using drones
 Artificial Intelligence applied for electrical grid inspection using drones 11/08/2018-10.22 am Asset management Grid reliability & efficiency Network management Software Drones are being used for overhead
Artificial Intelligence applied for electrical grid inspection using drones 11/08/2018-10.22 am Asset management Grid reliability & efficiency Network management Software Drones are being used for overhead
U g CS for DJI. Mobile companion application. Copyright 2016, Smart Projects Holdings Ltd
 U g CS for DJI Mobile companion application Copyright 2016, Smart Projects Holdings Ltd Contents Preface... 3 Drone connection and first run... 3 Before you begin... 3 First run... 3 Connecting smartphone
U g CS for DJI Mobile companion application Copyright 2016, Smart Projects Holdings Ltd Contents Preface... 3 Drone connection and first run... 3 Before you begin... 3 First run... 3 Connecting smartphone
Performing UAV Mission Planning, Design, & Optimization
 Performing UAV Mission Planning, Design, & Optimization Russ Magazzu UAV Product Manager Pg 1 of 30 Agenda Unmanned aerial systems application areas capabilities STK 8 Aircraft Mission Modeler Pg 2 of
Performing UAV Mission Planning, Design, & Optimization Russ Magazzu UAV Product Manager Pg 1 of 30 Agenda Unmanned aerial systems application areas capabilities STK 8 Aircraft Mission Modeler Pg 2 of
Comparative Analysis of Tri-rotor & Quad-rotor UAV
 Available online at www.scientiaresearchlibrary.com Scientia Research Library ISSN 2348-0424 USA CODEN: JETRB4 Journal of Engineering And Technology Research, 2014, 2 (6):98-106 (http://www.scientiaresearchlibrary.com/arhcive.php)
Available online at www.scientiaresearchlibrary.com Scientia Research Library ISSN 2348-0424 USA CODEN: JETRB4 Journal of Engineering And Technology Research, 2014, 2 (6):98-106 (http://www.scientiaresearchlibrary.com/arhcive.php)
Unmanned Aerial Vehicles as Data Mules for Reconnaissance and Environmental Monitoring
 Unmanned Aerial Vehicles as Data Mules for Reconnaissance and Environmental Monitoring - Srikanth Saripalli http://robotics.asu.edu srikanth.saripalli@asu.edu ARIZONA STATE UNIVERSITY / SCHOOL OF EARTH
Unmanned Aerial Vehicles as Data Mules for Reconnaissance and Environmental Monitoring - Srikanth Saripalli http://robotics.asu.edu srikanth.saripalli@asu.edu ARIZONA STATE UNIVERSITY / SCHOOL OF EARTH
Vision and Control for UAVs: A Survey of General Methods and of Inexpensive Platforms for Infrastructure Inspection
 Sensors 2015, 15, 14887-14916; doi:10.3390/s150714887 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Review Vision and Control for UAVs: A Survey of General Methods and of Inexpensive
Sensors 2015, 15, 14887-14916; doi:10.3390/s150714887 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Review Vision and Control for UAVs: A Survey of General Methods and of Inexpensive
Cooperative Control of Heterogeneous Robotic Systems
 Cooperative Control of Heterogeneous Robotic Systems N. Mišković, S. Bogdan, I. Petrović and Z. Vukić Department of Control And Computer Engineering Faculty of Electrical Engineering and Computing University
Cooperative Control of Heterogeneous Robotic Systems N. Mišković, S. Bogdan, I. Petrović and Z. Vukić Department of Control And Computer Engineering Faculty of Electrical Engineering and Computing University
THE SMARTEST EYES IN THE SKY
 THE SMARTEST EYES IN THE SKY ROBOTIC AERIAL SECURITY - US PATENT 9,864,372 Nightingale Security provides Robotic Aerial Security for corporations. Our comprehensive service consists of drones, base stations
THE SMARTEST EYES IN THE SKY ROBOTIC AERIAL SECURITY - US PATENT 9,864,372 Nightingale Security provides Robotic Aerial Security for corporations. Our comprehensive service consists of drones, base stations
THE SMARTEST EYES IN THE SKY
 THE SMARTEST EYES IN THE SKY ROBOTIC AERIAL SECURITY - US PATENT 9,864,372 Nightingale Security provides Robotic Aerial Security for corporations. Our comprehensive service consists of drones, base stations
THE SMARTEST EYES IN THE SKY ROBOTIC AERIAL SECURITY - US PATENT 9,864,372 Nightingale Security provides Robotic Aerial Security for corporations. Our comprehensive service consists of drones, base stations
TRAJECTORY TRACKING CONTROL OF A QUADROTOR DURING COOPERATIVE OPERATION BETWEEN UAV AND UGV. (Revised Version) AJIBOLA FOWOWE
 AJIBOLA FOWOWE") TRAJECTORY TRACKING CONTROL OF A QUADROTOR DURING COOPERATIVE OPERATION BETWEEN UAV AND UGV (Revised Version) by AJIBOLA FOWOWE Presented to the Faculty of the Graduate School of The University of Texas
TRAJECTORY TRACKING CONTROL OF A QUADROTOR DURING COOPERATIVE OPERATION BETWEEN UAV AND UGV (Revised Version) by AJIBOLA FOWOWE Presented to the Faculty of the Graduate School of The University of Texas
John Deere RGATOR TM. Feb 18, 2009 Bob Norris. w C
 John Deere RGATOR TM Feb 18, 2009 Bob Norris norriswilliamr@johndeere.com w - 704-587-2909 C - 704-607-2742 Agenda Design Concept Deployments System Capabilities and Missions Payloads Distinct Advantages
John Deere RGATOR TM Feb 18, 2009 Bob Norris norriswilliamr@johndeere.com w - 704-587-2909 C - 704-607-2742 Agenda Design Concept Deployments System Capabilities and Missions Payloads Distinct Advantages
Application of Robotics and AI Technologies to the Future ATM
 Application of Robotics and AI Technologies to the Future ATM Anibal Ollero University of Seville http://grvc.us.es aollero@us.es Scientific Advisor of CATEC Aerospace Technologies Center http://www.catec.aeo
Application of Robotics and AI Technologies to the Future ATM Anibal Ollero University of Seville http://grvc.us.es aollero@us.es Scientific Advisor of CATEC Aerospace Technologies Center http://www.catec.aeo
THE SMARTEST EYES IN THE SKY
 THE SMARTEST EYES IN THE SKY ROBOTIC AERIAL SECURITY - US PATENT 9,864,372 Nightingale Security provides Robotic Aerial Security for corporations. Our comprehensive service consists of drones, base stations
THE SMARTEST EYES IN THE SKY ROBOTIC AERIAL SECURITY - US PATENT 9,864,372 Nightingale Security provides Robotic Aerial Security for corporations. Our comprehensive service consists of drones, base stations
Indoor Mapping Drone. The University of Akron. Benjamin J. Plevny The University of Akron,
 The University of Akron IdeaExchange@UAkron Honors Research Projects The Dr. Gary B. and Pamela S. Williams Honors College Spring 2017 Indoor Mapping Drone Benjamin J. Plevny The University of Akron, bjp46@zips.uakron.edu
The University of Akron IdeaExchange@UAkron Honors Research Projects The Dr. Gary B. and Pamela S. Williams Honors College Spring 2017 Indoor Mapping Drone Benjamin J. Plevny The University of Akron, bjp46@zips.uakron.edu
EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS. Aerospace Controls Laboratory Massachusetts Institute of Technology
 EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS Ellis King, 1 Mehdi Alighanbari, Jonathan How 3 Aerospace Controls Laboratory Massachusetts Institute of Technology Abstract: This
EXPERIMENTAL DEMONSTRATION OF COORDINATED CONTROL FOR MULTI-VEHICLE TEAMS Ellis King, 1 Mehdi Alighanbari, Jonathan How 3 Aerospace Controls Laboratory Massachusetts Institute of Technology Abstract: This
APPLANIX POSITION AND ORIENTATION SYSTEMS FOR LAND VEHICLES (POS LV)
") APPLANIX POSITION AND ORIENTATION SYSTEMS FOR LAND VEHICLES (POS LV) POS LV powers any application where vehicle positioning and orientation is required. APPLANIX POSITION AND ORIENTATION SYSTEMS FOR LAND
APPLANIX POSITION AND ORIENTATION SYSTEMS FOR LAND VEHICLES (POS LV) POS LV powers any application where vehicle positioning and orientation is required. APPLANIX POSITION AND ORIENTATION SYSTEMS FOR LAND
We are IntechOpen, the first native scientific publisher of Open Access books. International authors and editors. Our authors are among the TOP 1%
 We are IntechOpen, the first native scientific publisher of Open Access books 3,350 108,000 1.7 M Open access books available International authors and editors Downloads Our authors are among the 151 Countries
We are IntechOpen, the first native scientific publisher of Open Access books 3,350 108,000 1.7 M Open access books available International authors and editors Downloads Our authors are among the 151 Countries
Autonomous Quadcopter UAS P15230
 Autonomous Quadcopter UAS P15230 Agenda Project Description / High Level Customer Needs / Eng Specs Concept Summary System Architecture Design Summary System Testing Results Objective Project Evaluation:
Autonomous Quadcopter UAS P15230 Agenda Project Description / High Level Customer Needs / Eng Specs Concept Summary System Architecture Design Summary System Testing Results Objective Project Evaluation:
Design and implantation of a search and find application on a heterogeneous robotic platform
 Design and implantation of a search and find application on a heterogeneous robotic platform Ahmed Barnawi, Abdullah Al-Barakati Faculty of Computing and IT, King Abdulaziz University, Jeddah, Saudi Arabia
Design and implantation of a search and find application on a heterogeneous robotic platform Ahmed Barnawi, Abdullah Al-Barakati Faculty of Computing and IT, King Abdulaziz University, Jeddah, Saudi Arabia
COMPLETE MONITORING OF GROUND CONTROL SYSTEM FOR HIGH SPEED UAV
 COMPLETE MONITORING OF GROUND CONTROL SYSTEM FOR HIGH SPEED UAV Herma Yudhi Irwanto Indonesian National Institute of Aeronautics and Space, Jakarta, Indonesia ABSTRACT Ground control system (GCS) was developed
COMPLETE MONITORING OF GROUND CONTROL SYSTEM FOR HIGH SPEED UAV Herma Yudhi Irwanto Indonesian National Institute of Aeronautics and Space, Jakarta, Indonesia ABSTRACT Ground control system (GCS) was developed
FLYING DYNAMICS WITH QUADCOPTER IN INDOOR AND OUTDOOR FLYING CAPABILITIES
 FLYING DYNAMICS WITH QUADCOPTER IN INDOOR AND OUTDOOR FLYING CAPABILITIES 1 Naveen Kumar.K, 2 Shiva.B, 3 S.S.Ganesh Kumar, 4 M.Sudhakaran 1,2 Dept of EEE, GTEC, Vellore, India 3 Asst. Prof, Dept of EEE,
FLYING DYNAMICS WITH QUADCOPTER IN INDOOR AND OUTDOOR FLYING CAPABILITIES 1 Naveen Kumar.K, 2 Shiva.B, 3 S.S.Ganesh Kumar, 4 M.Sudhakaran 1,2 Dept of EEE, GTEC, Vellore, India 3 Asst. Prof, Dept of EEE,
Drone Adjustment Play Block Coding System for Early Childhood
 , pp.122-126 http://dx.doi.org/10.14257/astl.2017.145.24 Drone Adjustment Play Block Coding System for Early Childhood Yeon-Jae Oh 1, Young-Sang Suh 2 and Eung-Kon Kim 1 1 Department of Computer Engineering,
, pp.122-126 http://dx.doi.org/10.14257/astl.2017.145.24 Drone Adjustment Play Block Coding System for Early Childhood Yeon-Jae Oh 1, Young-Sang Suh 2 and Eung-Kon Kim 1 1 Department of Computer Engineering,
Dynamic Target Tracking and Obstacle Avoidance using a Drone
 The th International Symposium on Visual Computing (ISVC), December 4-6, 205 Las Vegas, Nevada, USA. Dynamic Target Tracking and Obstacle Avoidance using a Drone Alexander C. Woods and Hung M. La (B) Advanced
The th International Symposium on Visual Computing (ISVC), December 4-6, 205 Las Vegas, Nevada, USA. Dynamic Target Tracking and Obstacle Avoidance using a Drone Alexander C. Woods and Hung M. La (B) Advanced
DRONES A Brief History and Design Overview. Tomorrow Lab June 2014
 DRONES A Brief History and Design Overview Tomorrow Lab June 2014 INTRODUCTION The intent of this document is to give a brief history and overview of drone technology from a design and engineering perspective,
DRONES A Brief History and Design Overview Tomorrow Lab June 2014 INTRODUCTION The intent of this document is to give a brief history and overview of drone technology from a design and engineering perspective,
TARIK VELI MUMCU.
 DEVELOPMENT OF THE CONTROL SYSTEM AND AUTOPILOT OF A HEXAROTOR AERIAL VEHICLE TARIK VELI MUMCU 1 Department of Control and Automation Engineering, Yildiz Technical University, Istanbul, Turkey E-mail:
DEVELOPMENT OF THE CONTROL SYSTEM AND AUTOPILOT OF A HEXAROTOR AERIAL VEHICLE TARIK VELI MUMCU 1 Department of Control and Automation Engineering, Yildiz Technical University, Istanbul, Turkey E-mail:
Drones in construction: Worker safety
 Drones in construction: Worker safety Vladimir Murashov, PhD U.S. National Institute for Occupational Safety and Health Washington, D.C. "The findings and conclusions in this presentation have not been
Drones in construction: Worker safety Vladimir Murashov, PhD U.S. National Institute for Occupational Safety and Health Washington, D.C. "The findings and conclusions in this presentation have not been
UAV SPATIAL MOTION MODEL IDENTIFICATION I. INTRODUCTION
 Prof. Dr. SZABOLCSI, Róbert 1, UAV SPATIAL MOTION MODEL IDENTIFICATION Abstract UAV includes ide variety of aircraft designed for special tasks. Many UAV applications use model aircraft to carry payload
Prof. Dr. SZABOLCSI, Róbert 1, UAV SPATIAL MOTION MODEL IDENTIFICATION Abstract UAV includes ide variety of aircraft designed for special tasks. Many UAV applications use model aircraft to carry payload
SELF AWARE VEHICLES FOR URBAN AIR MOBILITY: CHALLENGES AND OPPORTUNITIES
 SELF AWARE VEHICLES FOR URBAN AIR MOBILITY: CHALLENGES AND OPPORTUNITIES Irene M. Gregory, Ph.D., S.T. NASA Senior Technologist for Advanced Control Theory and Applications 2017 AFOSR Dynamics and Control
SELF AWARE VEHICLES FOR URBAN AIR MOBILITY: CHALLENGES AND OPPORTUNITIES Irene M. Gregory, Ph.D., S.T. NASA Senior Technologist for Advanced Control Theory and Applications 2017 AFOSR Dynamics and Control
Design of an Innovative Flight Controller for Quadcopter Robust Handling
 Design of an Innovative Flight Controller for Quadcopter Robust Handling A.Louros M.Papoutsidakis A.Chatzopoulos C.Drosos Abstract This senior thesis concerns the design and implementation of a quadcopter,
Design of an Innovative Flight Controller for Quadcopter Robust Handling A.Louros M.Papoutsidakis A.Chatzopoulos C.Drosos Abstract This senior thesis concerns the design and implementation of a quadcopter,
Tuning of PID Controllers for Quadcopter System using Hybrid Memory based Gravitational Search Algorithm Particle Swarm Optimization
 Tuning of PID Controllers for Quadcopter System using Hybrid Memory based Gravitational Search Algorithm Particle Swarm Optimization Nizar Hadi Abbas, PhD Assistant Professor College of Engineering, University
Tuning of PID Controllers for Quadcopter System using Hybrid Memory based Gravitational Search Algorithm Particle Swarm Optimization Nizar Hadi Abbas, PhD Assistant Professor College of Engineering, University
HARRIS RECON DRONE. Sean F Flemming, Senior in Mechanical Engineering, University of Michigan
 HARRIS RECON DRONE Sean F Flemming, Senior in Mechanical Engineering, University of Michigan Abstract This project was sponsored by Harris Corporation as part of the Multidisciplinary Design Program (MDP).
HARRIS RECON DRONE Sean F Flemming, Senior in Mechanical Engineering, University of Michigan Abstract This project was sponsored by Harris Corporation as part of the Multidisciplinary Design Program (MDP).
WHITE PAPER. UAVs ew Surveillance and Reconnaissance Options for the Battlefield, Homeland Defense, Law Enforcement, and Disaster Response
 WHITE PAPER UAVs ew Surveillance and Reconnaissance Options for the Battlefield, Homeland Defense, Law Enforcement, and Disaster Response By: PICS, Inc. 7620 Slater Overland Park, KS 66204 Contact: Mike
WHITE PAPER UAVs ew Surveillance and Reconnaissance Options for the Battlefield, Homeland Defense, Law Enforcement, and Disaster Response By: PICS, Inc. 7620 Slater Overland Park, KS 66204 Contact: Mike
Autonomous Quadcopter with Human Tracking and Gesture Recognition
 Autonomous Quadcopter with Human Tracking and Gesture Recognition Functional Description and Complete System Block Diagram Students: Jacob Hindle, Daniel Garber, and Bradley Lan Project Advisor: Dr. Joseph
Autonomous Quadcopter with Human Tracking and Gesture Recognition Functional Description and Complete System Block Diagram Students: Jacob Hindle, Daniel Garber, and Bradley Lan Project Advisor: Dr. Joseph