Today s Assignment. Outline. Principles of Autonomy and Decision Making. Objectives and Logistics Appendix: Agents and Their Building Blocks
|
|
|
- Arnold Malone
- 5 years ago
- Views:
Transcription
1 Principles of Autonomy and Decision Making Brian Williams / Session 26b 1 Today s Assignment Study for the final! Outline Objectives and Logistics Appendix: Agents and Their Building Blocks 1
2 Course Objective 1: Agent Architectures 1. To appreciate the major types of agents, their major functions and the applications they support. 2. To understand the common architectures used to develop agents. Understanding exercised through case studies. Agent Architecture (Objective 1) Communicate and Interpret Locate in World Monitor & Diagnosis Plan Execute Map Plan Routes Maneuver and Track Types of Agents (Objective 1) Mission-oriented Agents Self-repairing Agents Mobile Agents Agile Agents Communicating Agents 2
3 Course Objective 2: Principles of Agents /13: To learn the modeling and algorithmic building blocks for creating reasoning and learning agents: 1. To formulate reasoning problems in an appropriate formal representation. 2. To describe, analyze and demonstrate the application of reasoning algorithms to solve these problem formulations. Understanding demonstrated on paper and through implementation. Introduction to modeling, algorithms and analysis the next two Wednesday. Introduction to implementation the next two Mondays. Agent Building Blocks Activity Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Path Planning Localization Map Building Trajectory Design Policy Construction Course Objective 3: Implementing Agents : To appreciate the challenges of building a state of the art autonomous explorer: Fall 03: Mars Exploration Rover shadow mode demonstration. Fall 04: Gnu Robot competition. Fall 05: Model-based autonomy toolbox The virtual solar system Stay tuned for more. 3

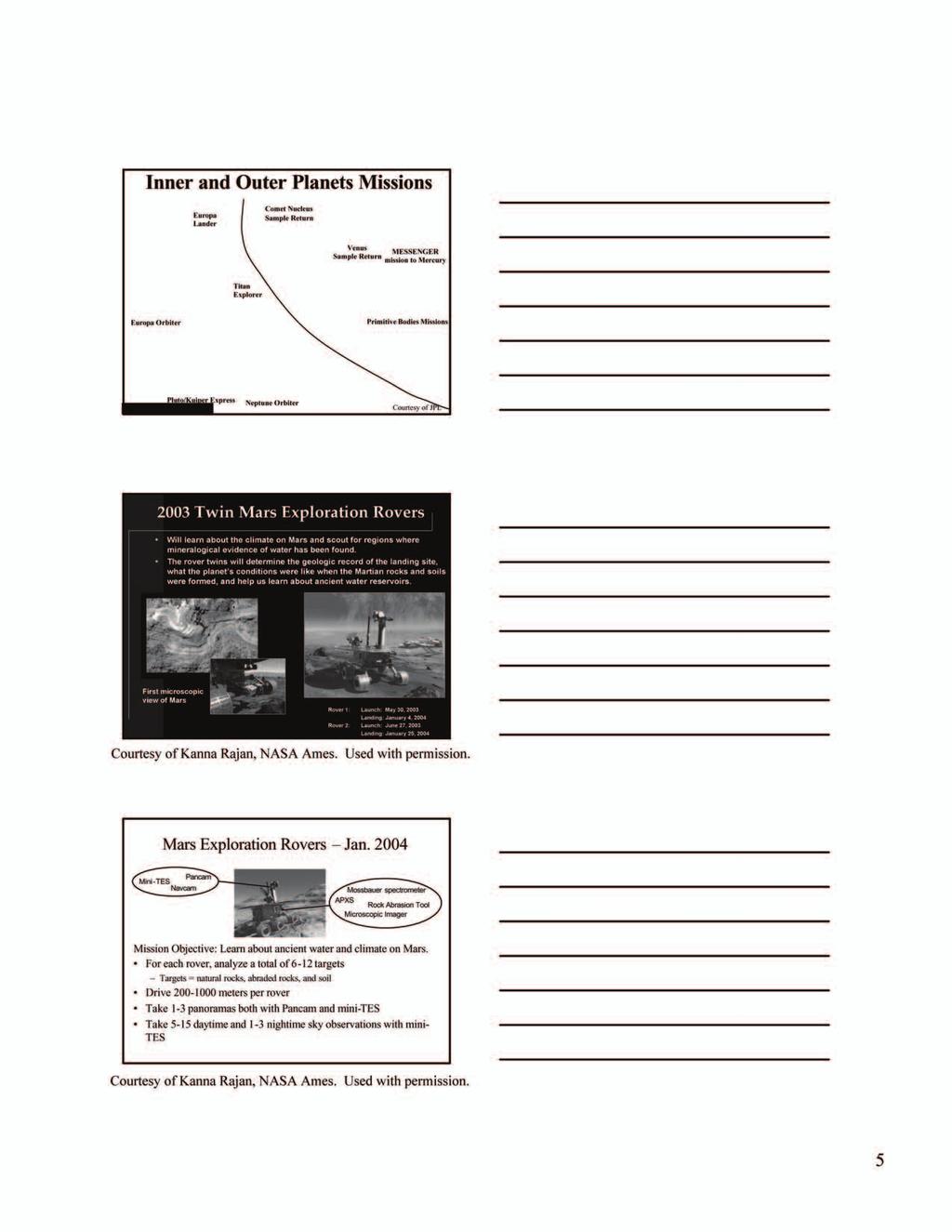
4 Outline Objectives and Logistics Appendix: Agents and Their Building Blocks Types of Agents (objective 1) 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents 1. Mission-Oriented Agents courtesy JPL ``Our vision in NASA is to open the Space Frontier... We must establish a virtual presence, in space, on planets, in aircraft and spacecraft. - Daniel S. Goldin, NASA Administrator, May 29, 1996 Courtesy of Kanna Rajan, NASA Ames. Used with permission. 4
5

6 DTE Activity Name Night Time Rover Operations Pre-Comm Session Sequence Plan Durat on Current Sol Sequence Plan Review DTE period Sleep Current Sol Sequence Plan Review Night Time Rover Operations 2.00 Prior Sol Sequence Plan Review Prior Sol Sequence Plan Review 4.50 Real-TIme Monitoring Real-TIme Monitoring Real-TIme Monitoring 0.75 Downlink Product Generation Downlink Product Generation Tactical Science 5.00 Tactical Science Assessment/Observation Planning Assessment/Observation Planning 1.00 Science DL Assessment Meeting Science DL Assessment Meeting Payload DL/UL Handoffs 0.50 Payload DL/UL Handoffs Tactical End-of-Sol Engr. Assessm 5.50 Tactical End-of-Sol Engr. Assessment & Planning Planning 0.50 DL/UL Handover Meeting DL/UL Handover Meeting Skeleton Activity Plan Update 2.50 Skeleton Activity Plan Update SOWG Meeting 2.00 SOWG Meeting 0.25 Uplink Kickoff Meeting Uplink Kickoff Meeting 1.75 Activity Plan Integration & Validatio Activity Plan Integration & Validation Activity Plan Approval Meeting 0.50 Activity Plan Approval Meeting Build & Validate Sequences 2.25 Build & Validate Sequences 1.00 UL1/UL2 Handover UL1/UL2 Handover 2.50 Complete/Rework Sequences Complete/Rework Sequence 0.75 Margin 1 Margin 1 Command & Radiation Approval 0.50 Command & Radiati Margin Margin Radiation Radiation 7.00 MCT Team 4.00 Wakeup DFE One day in the life of a Mars rover rover operation (7 hr) tactical sci assess & obs planning (5 hr) tactical end-of -sol eng assess (5 hr) SOWG mtg(2 hr) activity integration & validation (3.5 hr) sequence development (5.5 hr) sequence integration & validation (4 hr) Courtesy of Kanna Rajan, NASA Ames. Used with permission. Agent Building Blocks (objective 2) Activity Planning Execution/Monitoring Types of Agents (objective 1) 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents 6

7 7 year cruise ~ ground operators 2. Self-Repairing Agents Affordable Missions ~ 1 billion $ 150 million $ 7 years to build 2 year build 0 ground ops Cassini Maps Titan courtesy JPL Four launches in 7 months Mars Climate Orbiter: 12/11/98 Mars Polar Lander: 1/3/9 Stardust: 2/7/99 QuickSCAT: 6/19/98 courtesy of JP Mars Polar Lander Spacecraft require a good physical commonsense Launch: 1/3/99 courtesy of JPL 7
8

9 Remote Agent Goals Goal-directed First time correct projective reactive Commonsense models Mission Description Executive Scripts Heavily deductive Planner/ Scheduler Diagnosis & Repair Mission-level actions & resources component models Remote Agent Experiment May 17-18th experiment Generate plan for course correction and thrust Diagnose camera as stuck on Power constraints violated, abort current plan and replan Perform optical navigation Perform ion propulsion thrust May 21th experiment. Diagnose faulty device and Repair by issuing reset. Diagnose switch sensor failure. Determine harmless, and continue plan. Diagnose thruster stuck closed and Repair by switching to alternate method of thrusting. Back to back planning Agent Architecture (Objective 1) Plan Monitor & Diagnosis Execute 9

10 Agent Building Blocks (Objective 2) Activity Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Types of Agents (Objective 1) 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents 3. Mobile Agents Day 2 Initial Position; Followed by Close Approach Day 2 Traverse Estimated Error Circle Target Day 2 Traverse Estimated Error Circle Day 1 Long-Distance Traverse (<20-50 meters) During the Day Autonomous On-Board Navigation Changes, as needed Day 3 Science Prep (if Required) Day 4 During the Day Science Activities Courtesy of Kanna Rajan, NASA Ames. Used with permission. 10
11
12 Agent Building Blocks (Objective 2) Activity Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Path Planning Localization Map Building Agent Architecture (Objective 1) Locate in World Monitor & Diagnosis Plan Execute Map Plan Routes 13
13 Types of Agents (objective 1) 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents 4. Agile Agents 14
14 Agent Building Blocks Activity Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Path Planning Localization Map Building Trajectory Design Policy Construction Agent Architecture (Objective 1) Locate in World Monitor & Diagnosis Plan Execute Map Plan Routes Maneuver and Track Types of Agents (objective 1) 1. Mission-oriented Agents 2. Self-repairing Agents 3. Mobile Agents 4. Agile Agents 5. Communicating Agents 15
 Communicate and Interpret Locate in World Monitor & Diagnosis Plan Execute Map Plan")
15 5. Communicating Agents Agent Building Blocks (Objective 1) Activity Planning Execution/Monitoring Diagnosis Repair Scheduling Resource Allocation Path Planning Localization Map Building Trajectory Design Policy Construction Plan Adaptation Dialogue Management People Tracking Agent Architecture (Objective 1) Communicate and Interpret Locate in World Monitor & Diagnosis Plan Execute Map Plan Routes Maneuver and Track 16
16

17 Example: surface exploration ERA EVA robotic assistant follows astronaut and helps with sample collection, instrument placement Example Mission Scenario: Task Execution Robot walks to its sample area Begins collecting samples Walks back to astronaut Stumbles over unseen rock along the way, but recovers using appropriate limb motions 18
Building the Ground Data System for the Mars Science Laboratory (MSL) Project Challenges and Opportunities
 Project Challenges and Opportunities") SpaceOps 2008 Conference (Hosted and organized by ESA and EUMETSAT in association with AIAA) AIAA 2008-3233 Building the Ground Data System for the Mars Science Laboratory (MSL) Project Challenges and
SpaceOps 2008 Conference (Hosted and organized by ESA and EUMETSAT in association with AIAA) AIAA 2008-3233 Building the Ground Data System for the Mars Science Laboratory (MSL) Project Challenges and
MAPGEN: Mixed Initiative Planning and Scheduling for the Mars 03 MER Mission
 From: AAAI Technical Report SS-03-04. Compilation copyright 2003, AAAI (www.aaai.org). All rights reserved. MAPGEN: Mixed Initiative Planning and Scheduling for the Mars 03 MER Mission Mitchell Ai-Chang,
From: AAAI Technical Report SS-03-04. Compilation copyright 2003, AAAI (www.aaai.org). All rights reserved. MAPGEN: Mixed Initiative Planning and Scheduling for the Mars 03 MER Mission Mitchell Ai-Chang,
Rapid Turnaround of Costing/Designing of Space Missions Operations
 SpaceOps 2008 Conference (Hosted and organized by ESA and EUMETSAT in association with AIAA) AIAA 2008-3264 Rapid Turnaround of Costing/Designing of Space Missions Operations Paul D. Kudrle 1 and Gregory
SpaceOps 2008 Conference (Hosted and organized by ESA and EUMETSAT in association with AIAA) AIAA 2008-3264 Rapid Turnaround of Costing/Designing of Space Missions Operations Paul D. Kudrle 1 and Gregory
Course Project. CS886 Multi Agent Systems for Real World Applications. Stefan Büttcher
 Course Project CS886 Multi Agent Systems for Real World Applications Stefan Büttcher University of Waterloo, Spring 2004 Why agents? Why autonomy? Implementing autonomous agents
Course Project CS886 Multi Agent Systems for Real World Applications Stefan Büttcher University of Waterloo, Spring 2004 Why agents? Why autonomy? Implementing autonomous agents
To understand the importance of defining a mission or project s scope.
 Scoping & CONOPS 1 Agenda To understand the importance of defining a mission or project s scope. To explain the contents of scope, including needs, goals, objectives, assumptions, authority and responsibility,
Scoping & CONOPS 1 Agenda To understand the importance of defining a mission or project s scope. To explain the contents of scope, including needs, goals, objectives, assumptions, authority and responsibility,
Canadian Robotic Technologies For Lunar Surface Exploration. Frank Teti MDA
 Canadian Robotic Technologies For Lunar Surface Exploration Frank Teti MDA 9 th th ILEWG Conference, Sorrento, 2007 A New Exploration Era 20 th Century Exploration Low-earth Orbit Human Space infrastructure
Canadian Robotic Technologies For Lunar Surface Exploration Frank Teti MDA 9 th th ILEWG Conference, Sorrento, 2007 A New Exploration Era 20 th Century Exploration Low-earth Orbit Human Space infrastructure
Small Satellite Rideshares on Commercial Resupply Missions to the International Space Station SmallSat Conference 2012
 Small Satellite Rideshares on Commercial Resupply Missions to the International Space Station SmallSat Conference 2012 Joshua R. Robinson(Presenting) Daniel W. Kwon August 14, 2012 Introduction Gaining
Small Satellite Rideshares on Commercial Resupply Missions to the International Space Station SmallSat Conference 2012 Joshua R. Robinson(Presenting) Daniel W. Kwon August 14, 2012 Introduction Gaining
ALTAIR Millennium s DARPA SeeMe Commercial Satellite Solution Technical (R)evolution. Presentation to: 2014 AIAA/USU Conference on Small Satellites
evolution. Presentation to: 2014 AIAA/USU Conference on Small Satellites") ALTAIR Millennium s DARPA SeeMe Commercial Satellite Solution Technical (R)evolution [SSC14-III-2} Presentation to: 2014 AIAA/USU Conference on Small Satellites Mike Scardera Director of Engineering mike.scardera@millennium-space.com
ALTAIR Millennium s DARPA SeeMe Commercial Satellite Solution Technical (R)evolution [SSC14-III-2} Presentation to: 2014 AIAA/USU Conference on Small Satellites Mike Scardera Director of Engineering mike.scardera@millennium-space.com
Safety Framework for Nuclear Power Source Applications in Outer Space
 Safety Framework for Nuclear Power Source Applications in Outer Space NASA/ESA/ASI/JPL The IAEA Safety Glossary clarifies and harmonizes terminology and usage in the IAEA safety standards. To this end,
Safety Framework for Nuclear Power Source Applications in Outer Space NASA/ESA/ASI/JPL The IAEA Safety Glossary clarifies and harmonizes terminology and usage in the IAEA safety standards. To this end,
Big Data and NASA Space Sciences
 Big Data and NASA Space Sciences Daniel Crichton Leader, Center for Data Science and Technology Manager, Data Science Office Jet Propulsion Laboratory November 2, 2017 Terms: Big Data and Data Science
Big Data and NASA Space Sciences Daniel Crichton Leader, Center for Data Science and Technology Manager, Data Science Office Jet Propulsion Laboratory November 2, 2017 Terms: Big Data and Data Science
MSR Planning Presentation to the Planetary Science Subcommittee 23 June Lisa May MSR Program Executive
 MSR Planning Presentation to the Planetary Science Subcommittee 23 June 2008 Lisa May MSR Program Executive Lisa.May@nasa.gov Mars Sample Return Planning Overview: NASA Planning Community Input International
MSR Planning Presentation to the Planetary Science Subcommittee 23 June 2008 Lisa May MSR Program Executive Lisa.May@nasa.gov Mars Sample Return Planning Overview: NASA Planning Community Input International
Using Modern Methodologies with Maintenance Software
 SpaceOps Conferences 5-9 May 2014, Pasadena, CA SpaceOps 2014 Conference 10.2514/6.2014-1847 Using Modern Methodologies with Maintenance Software Barbara A. Streiffert 1 and Laurie K. Francis 2 Jet Propulsion
SpaceOps Conferences 5-9 May 2014, Pasadena, CA SpaceOps 2014 Conference 10.2514/6.2014-1847 Using Modern Methodologies with Maintenance Software Barbara A. Streiffert 1 and Laurie K. Francis 2 Jet Propulsion
Tactical Technology Office
 Tactical Technology Office Pamela A. Melroy, Deputy Director Briefing prepared for the Aeronautics and Space Engineering Board (ASEB) April 2, 2014 Mission The Defense Advanced Research Projects Agency
Tactical Technology Office Pamela A. Melroy, Deputy Director Briefing prepared for the Aeronautics and Space Engineering Board (ASEB) April 2, 2014 Mission The Defense Advanced Research Projects Agency
Overview. - domain overview - scheduling requests, constraints and preferences - expanding requests, resolving conflicts, and constraint
 Overview Deep Space Network (DSN) scheduling - domain overview - scheduling requests, constraints and preferences - expanding requests, resolving conflicts, and constraint relaxation Multi-Objective Scheduling
Overview Deep Space Network (DSN) scheduling - domain overview - scheduling requests, constraints and preferences - expanding requests, resolving conflicts, and constraint relaxation Multi-Objective Scheduling
Tutorials and Labs. Day 3: Activity Planning. Day 4: Perception and Manipulation. Day 5: Planning with Uncertainty and Risk
 Lab 3: Modeling Tutorials and Labs Day 1: Robust Execution Introduction 1: Architectures for Autonomy Tutorial 2: Self-Monitoring, Self-Diagnosing Systems Tutorial 3: Temporal Networks for Dynamic Scheduling
Lab 3: Modeling Tutorials and Labs Day 1: Robust Execution Introduction 1: Architectures for Autonomy Tutorial 2: Self-Monitoring, Self-Diagnosing Systems Tutorial 3: Temporal Networks for Dynamic Scheduling
A Comprehensive Architecture for the 21 st Century. Defense Advanced Research Projects Agency
 A Comprehensive Architecture for the 21 st Century Sam B. Wilson, III Defense Advanced Research Projects Agency swilson@darpa.mil (703) 696-2310 DoD Space Architecture Limits Operational System availability
A Comprehensive Architecture for the 21 st Century Sam B. Wilson, III Defense Advanced Research Projects Agency swilson@darpa.mil (703) 696-2310 DoD Space Architecture Limits Operational System availability
Fault Protection Techniques in JPL Spacecraft
 Fault Protection Techniques in JPL Spacecraft Paula S. Morgan Jet Propulsion Laboratory/California Institute of Technology, Pasadena, California (818-393-1092) Paula.S.Morgan@jpl.nasa.gov Abstract: For
Fault Protection Techniques in JPL Spacecraft Paula S. Morgan Jet Propulsion Laboratory/California Institute of Technology, Pasadena, California (818-393-1092) Paula.S.Morgan@jpl.nasa.gov Abstract: For
Adjustable Autonomy for Human-Centered Autonomous Systems on Mars
 Adjustable Autonomy for Human-Centered Autonomous Systems on Mars Gregory A. Dorais [gadorais@ptolemy.arc.nasa.gov] R. Peter Bonasso [bonasso@mickey.jsc.nasa.gov] * David Kortenkamp [kortenkamp@jsc.nasa.gov]
Adjustable Autonomy for Human-Centered Autonomous Systems on Mars Gregory A. Dorais [gadorais@ptolemy.arc.nasa.gov] R. Peter Bonasso [bonasso@mickey.jsc.nasa.gov] * David Kortenkamp [kortenkamp@jsc.nasa.gov]
Validation, Verification and MER Case Study
 Validation, Verification and MER Case Study Prof. Chris Johnson, School of Computing Science, University of Glasgow. johnson@dcs.gla.ac.uk http://www.dcs.gla.ac.uk/~johnson Introduction. Definitions and
Validation, Verification and MER Case Study Prof. Chris Johnson, School of Computing Science, University of Glasgow. johnson@dcs.gla.ac.uk http://www.dcs.gla.ac.uk/~johnson Introduction. Definitions and
Scoping & Concept of Operations (ConOps) Module
 Module") Scoping & Concept of Operations (ConOps) Module Space Systems Engineering, version 1.0 Space Systems Engineering: Scoping & ConOps Module Module Purpose: Scoping & ConOps To understand the importance of
Scoping & Concept of Operations (ConOps) Module Space Systems Engineering, version 1.0 Space Systems Engineering: Scoping & ConOps Module Module Purpose: Scoping & ConOps To understand the importance of
Anticipate, Find, Fix, Track, Target, Engage, Assess Anything, Anytime, Anywhere Energized By Focused Long Term Challenge (FLTC) Plans
 Plans") AF S&T Challenges for Responsive Space Colonel Rex R. Kiziah Materiel Wing Director, Space Vehicles Air Force Research Laboratory 1 Overview AFRL Focused Long Term Challenges (FLTCs) Responsive spacecraft
AF S&T Challenges for Responsive Space Colonel Rex R. Kiziah Materiel Wing Director, Space Vehicles Air Force Research Laboratory 1 Overview AFRL Focused Long Term Challenges (FLTCs) Responsive spacecraft
Collaboration Between Unmanned Aerial and Ground Vehicles. Dr. Daisy Tang
 Collaboration Between Unmanned Aerial and Ground Vehicles Dr. Daisy Tang Key Components Autonomous control of individual agent Collaborative system Mission planning Task allocation Communication Data fusion
Collaboration Between Unmanned Aerial and Ground Vehicles Dr. Daisy Tang Key Components Autonomous control of individual agent Collaborative system Mission planning Task allocation Communication Data fusion
Validation, Verification and MER Case Study
 Validation, Verification and MER Case Study Prof. Chris Johnson, School of Computing Science, University of Glasgow. johnson@dcs.gla.ac.uk http://www.dcs.gla.ac.uk/~johnson Introduction. Definitions and
Validation, Verification and MER Case Study Prof. Chris Johnson, School of Computing Science, University of Glasgow. johnson@dcs.gla.ac.uk http://www.dcs.gla.ac.uk/~johnson Introduction. Definitions and
European Space Nuclear Power Programme: UK Activities. Dr Major S. Chahal Technology and Knowledge Exchange
 European Space Nuclear Power Programme: UK Activities Dr Major S. Chahal Technology and Knowledge Exchange www.ukspaceagency.bis.gov.uk 9 th February 2012 Why Nuclear? Solar power can be used with low
European Space Nuclear Power Programme: UK Activities Dr Major S. Chahal Technology and Knowledge Exchange www.ukspaceagency.bis.gov.uk 9 th February 2012 Why Nuclear? Solar power can be used with low
Nuclear Power in Space
 Nuclear Power in Space Zara Hodgson 9 th International School on Nuclear Power, Warsaw, Poland 16 th November 2017 Introduction Zara Hodgson Chemical Engineer with over 15 years in nuclear Lead NNL s Research
Nuclear Power in Space Zara Hodgson 9 th International School on Nuclear Power, Warsaw, Poland 16 th November 2017 Introduction Zara Hodgson Chemical Engineer with over 15 years in nuclear Lead NNL s Research
Scoping & Concept of Operations (ConOps) Module Exploration Systems Engineering, version 1.0
 Module Exploration Systems Engineering, version 1.0") Scoping & Concept of Operations (ConOps) Module Exploration Systems Engineering, version 1.0 Exploration Systems Engineering: Scoping & ConOps Module Module Purpose: Scoping & ConOps To understand the
Scoping & Concept of Operations (ConOps) Module Exploration Systems Engineering, version 1.0 Exploration Systems Engineering: Scoping & ConOps Module Module Purpose: Scoping & ConOps To understand the
FOUO. MarCO. Mars Cube One FOUO
 FOUO MarCO Mars Cube One FOUO 1 MarCO TCM 5 Mars Mars Cube One TCM 4 TCM 3 6.5 Month Cruise TCM 2 March 2016 TCM 1 Earth Entry, Descent, and Landing Sept 28, 2016 Mission Objective: Provide an 8kbps real-time
FOUO MarCO Mars Cube One FOUO 1 MarCO TCM 5 Mars Mars Cube One TCM 4 TCM 3 6.5 Month Cruise TCM 2 March 2016 TCM 1 Earth Entry, Descent, and Landing Sept 28, 2016 Mission Objective: Provide an 8kbps real-time
EVA Bioinformatics - Overview
 EVA Bioinformatics - Overview EVA Technology Workshop 2017 October 17, 2017 Meghan Downs, PhD EVA Physiology EVA Bioinformatics Panel Overview Dr. Meghan Downs: EVA Bioinformatics background & future exploration
EVA Bioinformatics - Overview EVA Technology Workshop 2017 October 17, 2017 Meghan Downs, PhD EVA Physiology EVA Bioinformatics Panel Overview Dr. Meghan Downs: EVA Bioinformatics background & future exploration
LAUNCHERONE: VIRGIN ORBIT'S DEDICATED LAUNCH VEHICLE FOR SMALL SATELLITES & IMPACT TO THE SPACE ENTERPRISE VISION
 LAUNCHERONE: VIRGIN ORBIT'S DEDICATED LAUNCH VEHICLE FOR SMALL SATELLITES & IMPACT TO THE SPACE ENTERPRISE VISION Mandy Vaughn VOX Space Jeff Kwong VOX Space Will Pomerantz Virgin Orbit ABSTRACT Virgin
LAUNCHERONE: VIRGIN ORBIT'S DEDICATED LAUNCH VEHICLE FOR SMALL SATELLITES & IMPACT TO THE SPACE ENTERPRISE VISION Mandy Vaughn VOX Space Jeff Kwong VOX Space Will Pomerantz Virgin Orbit ABSTRACT Virgin
Human Factors and Systems Engineering Explorations of Spaceflight Operations
 College of Engineering Human Factors and Systems Engineering Explorations of Spaceflight Operations Barrett S. Caldwell, PhD, CHFP Schools of Industrial Engineering / Aeronautics & Astronautics Purdue
College of Engineering Human Factors and Systems Engineering Explorations of Spaceflight Operations Barrett S. Caldwell, PhD, CHFP Schools of Industrial Engineering / Aeronautics & Astronautics Purdue
Advanced Information Systems Big Data Study for Earth Science
 Advanced Information Systems Big Study for Earth Science Daniel Crichton, NASA Jet Propulsion Laboratory Michael Little, NASA Headquarters October 29, 2015 Background NASA has historically focused on systematic
Advanced Information Systems Big Study for Earth Science Daniel Crichton, NASA Jet Propulsion Laboratory Michael Little, NASA Headquarters October 29, 2015 Background NASA has historically focused on systematic
Exploration Program Status
 National Aeronautics and Space Administration! Exploration Program Status Doug Cooke! Associate Administrator! NASAʼs Exploration Systems Mission Directorate! January 11, 2011! A New Path: The NASA Authorization
National Aeronautics and Space Administration! Exploration Program Status Doug Cooke! Associate Administrator! NASAʼs Exploration Systems Mission Directorate! January 11, 2011! A New Path: The NASA Authorization
EuLISA COMMUNICATIONS. Session 5bis ESTEC, 6 st July Prepared by the ICPA / CDF* Team. (*) ESTEC Concurrent Design Facility
 ESTEC Concurrent Design Facility") EuLISA COMMUNICATIONS Session 5bis ESTEC, 6 st July 2011 Prepared by the ICPA / CDF* Team (*) ESTEC Concurrent Design Facility Assumptions and Req. Autonomous S/C comms capability for at least safe and
EuLISA COMMUNICATIONS Session 5bis ESTEC, 6 st July 2011 Prepared by the ICPA / CDF* Team (*) ESTEC Concurrent Design Facility Assumptions and Req. Autonomous S/C comms capability for at least safe and
Executive Summary. Revision chart and history log "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" Contract B-0068-GEM3-GC
 Contract B-0068-GEM3-GC") Project "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" under Contract B-0068-GEM3-GC Executive Summary Period covered: 04.08.09 31.05.10 Issue Date: 30.06.2010 Start date of project: 04.08.09 Duration: 9 months
Project "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" under Contract B-0068-GEM3-GC Executive Summary Period covered: 04.08.09 31.05.10 Issue Date: 30.06.2010 Start date of project: 04.08.09 Duration: 9 months
Terrestrial Analogs for Planetary Surface Facility Planning and Operations.
 Abstract Terrestrial Analogs for Planetary Surface Facility Planning and Operations. Olga Bannova, University of Houston Sasakawa International Center for Space Architecture, Houston, TX 77204-4000, USA
Abstract Terrestrial Analogs for Planetary Surface Facility Planning and Operations. Olga Bannova, University of Houston Sasakawa International Center for Space Architecture, Houston, TX 77204-4000, USA
ON-BOARD AUTONOMY FOR A LOW COST LUNAR MISSION
 ON-BOARD AUTONOMY FOR A LOW COST LUNAR MISSION N.D Monekosso Surrey Satellite Technology Ltd Centre for Satellite Engineering Research University of Surrey, GU2 5XH, UK Ndedi.Monekosso@ee.surrey.ac.uk
ON-BOARD AUTONOMY FOR A LOW COST LUNAR MISSION N.D Monekosso Surrey Satellite Technology Ltd Centre for Satellite Engineering Research University of Surrey, GU2 5XH, UK Ndedi.Monekosso@ee.surrey.ac.uk
DRAFT. Robotic Lunar Exploration Program Lunar Reconnaissance Orbiter. Mechanical Environments and Verification Requirements. Date: April 25, 2005
 DRAFT Robotic Lunar Exploration Program Lunar Reconnaissance Orbiter Mechanical Environments and Verification Requirements Date: April 25, 2005 Goddard Space Flight Center Greenbelt, Maryland National
DRAFT Robotic Lunar Exploration Program Lunar Reconnaissance Orbiter Mechanical Environments and Verification Requirements Date: April 25, 2005 Goddard Space Flight Center Greenbelt, Maryland National
November 2, In Situ Resource Utilization Planning the Mine and Mining the Plan
 November 2, 2016 1 In Situ Resource Utilization Planning the Mine and Mining the Plan November 2, 2016 2 Space Mining is one form of In Situ Resource Utilization (ISRU) November 2, 2016 3 The Mining Cycle
November 2, 2016 1 In Situ Resource Utilization Planning the Mine and Mining the Plan November 2, 2016 2 Space Mining is one form of In Situ Resource Utilization (ISRU) November 2, 2016 3 The Mining Cycle
Planning for Rover Opportunistic Science
 Planning for Rover Opportunistic Science Daniel M. Gaines, Tara Estlin, Forest Fisher, Caroline Chouinard, Rebecca Castaño, and Robert C. Anderson Jet Propulsion Laboratory California Institute of Technology
Planning for Rover Opportunistic Science Daniel M. Gaines, Tara Estlin, Forest Fisher, Caroline Chouinard, Rebecca Castaño, and Robert C. Anderson Jet Propulsion Laboratory California Institute of Technology
Dream Chaser Commercial Space Program Update
 Dream Chaser Commercial Space Program Update John Curry, Co-Program Manager July 2014 Corporate Summary 100% Privately Owned by Mgt 3,000 Employees 2013 Revenue ~$2 Billion Average 10 year growth of 20%
Dream Chaser Commercial Space Program Update John Curry, Co-Program Manager July 2014 Corporate Summary 100% Privately Owned by Mgt 3,000 Employees 2013 Revenue ~$2 Billion Average 10 year growth of 20%
Fault Detection, Diagnosis, and Mitigation for Long-Duration AUV Missions with Minimal Human Intervention
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fault Detection, Diagnosis, and Mitigation for Long-Duration AUV Missions with Minimal Human Intervention James Bellingham
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Fault Detection, Diagnosis, and Mitigation for Long-Duration AUV Missions with Minimal Human Intervention James Bellingham
Progress and Plans for Sierra Nevada Corporation s NextSTEP-2 Deep Space Habitat
 AIAA SPACE Forum 12-14 Sep 2017, Orlando, FL AIAA SPACE and Astronautics Forum and Exposition AIAA 2017-5102 Progress and Plans for Sierra Nevada Corporation s NextSTEP-2 Deep Space Habitat Jeff Valania
AIAA SPACE Forum 12-14 Sep 2017, Orlando, FL AIAA SPACE and Astronautics Forum and Exposition AIAA 2017-5102 Progress and Plans for Sierra Nevada Corporation s NextSTEP-2 Deep Space Habitat Jeff Valania
Forum on Concepts and Approaches for Jupiter Icy Moons Orbiter Science Capabilities & Workshop Goals
 PROJECT PROMETHEUS PROJECT PROMETHEUS The Nuclear Systems Program Forum on Concepts and Approaches for Jupiter Icy Moons Orbiter Science Capabilities & Workshop Goals Alan Newhouse Director Project Prometheus,
PROJECT PROMETHEUS PROJECT PROMETHEUS The Nuclear Systems Program Forum on Concepts and Approaches for Jupiter Icy Moons Orbiter Science Capabilities & Workshop Goals Alan Newhouse Director Project Prometheus,
Small Satellite Rideshares on Commercial Resupply Missions to the International Space Station
 SSC12-V-2 Small Satellite Rideshares on Commercial Resupply Missions to the International Space Station Joshua R. Robinson and Daniel W. Kwon Orbital Sciences Corporation 45101 Warp Drive Dulles, VA 20166
SSC12-V-2 Small Satellite Rideshares on Commercial Resupply Missions to the International Space Station Joshua R. Robinson and Daniel W. Kwon Orbital Sciences Corporation 45101 Warp Drive Dulles, VA 20166
Using Auto-Generated Diagnostic Trees for Verification of Operational Procedures in Software-Hardware Systems
 Using Auto-Generated Diagnostic Trees for Verification of Operational Procedures in Software-Hardware Systems Tolga Kurtoglu Mission Critical Technologies @ NASA Ames Research Center tolga.kurtoglu@nasa.gov
Using Auto-Generated Diagnostic Trees for Verification of Operational Procedures in Software-Hardware Systems Tolga Kurtoglu Mission Critical Technologies @ NASA Ames Research Center tolga.kurtoglu@nasa.gov
Lecture 10: Managing Risk. Risk Management
 General ideas about Risk Risk Management Identifying Risks Assessing Risks Case Study: Mars Polar Lander Lecture 10: Managing Risk 2008 Steve Easterbrook. This presentation is available free for non-commercial
General ideas about Risk Risk Management Identifying Risks Assessing Risks Case Study: Mars Polar Lander Lecture 10: Managing Risk 2008 Steve Easterbrook. This presentation is available free for non-commercial
Modeling and Control of Small and Mini Rotorcraft UAVs
 Contents 1 Introduction... 1 1.1 What are Unmanned Aerial Vehicles (UAVs) and Micro Aerial Vehicles (MAVs)?... 2 1.2 Unmanned Aerial Vehicles and Micro Aerial Vehicles: Definitions, History,Classification,
Contents 1 Introduction... 1 1.1 What are Unmanned Aerial Vehicles (UAVs) and Micro Aerial Vehicles (MAVs)?... 2 1.2 Unmanned Aerial Vehicles and Micro Aerial Vehicles: Definitions, History,Classification,
Safe Testing and Execution of Autonomy in Complex, Interactive Environments. Safe and Secure Systems and Software Symposium (S5) 7/12/2016
 7/12/2016") Safe Testing and Execution of Autonomy in Complex, Interactive Environments Safe and Secure Systems and Software Symposium (S5) 7/12/2016 David Scheidt William Van Besien david.scheidt@jhuapl.edu William.Van.Besien@jhuapl.edu
Safe Testing and Execution of Autonomy in Complex, Interactive Environments Safe and Secure Systems and Software Symposium (S5) 7/12/2016 David Scheidt William Van Besien david.scheidt@jhuapl.edu William.Van.Besien@jhuapl.edu
Design Project/484 Planning
 Design Project/484 Planning Lecture #26 December 6, 2012 Current status of design architecture strawman Spring 2013 Organization 1 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Design Project/484 Planning Lecture #26 December 6, 2012 Current status of design architecture strawman Spring 2013 Organization 1 2012 David L. Akin - All rights reserved http://spacecraft.ssl.umd.edu
Posted onmarch 15, formally published on December 21, 2000 by Linkoping University Electronic Press Linkoping, Sweden Linkoping Electronic Arti
 Linkoping Electronic Articles in Computer and Information Science Vol. 5(2000): nr 16 Using Continuous Planning Techniques to Coordinate Multiple Rovers Tara Estlin, Gregg Rabideau, Darren Mutz, and Steve
Linkoping Electronic Articles in Computer and Information Science Vol. 5(2000): nr 16 Using Continuous Planning Techniques to Coordinate Multiple Rovers Tara Estlin, Gregg Rabideau, Darren Mutz, and Steve
MSL Technical and Replan Status
 MSL Technical and Replan Status Richard Cook Integrated Spacecraft Cruise Stage Cruise Stage Status Completed Deliveries Primary structure Attitude Control Sensors (Star scanner, sun sensor, etc) Propulsion
MSL Technical and Replan Status Richard Cook Integrated Spacecraft Cruise Stage Cruise Stage Status Completed Deliveries Primary structure Attitude Control Sensors (Star scanner, sun sensor, etc) Propulsion
Enhancing Autonomy with Trust: Pilot license to the autonomy Presented by S. Bhattacharyya
 Enhancing Autonomy with Trust: Pilot license to the autonomy Presented by S. Bhattacharyya Slide 1 UAVs are Here! Slide 2 Autonomy / Verification Context Damage-Tolerant Flight Controls Emergency Mission
Enhancing Autonomy with Trust: Pilot license to the autonomy Presented by S. Bhattacharyya Slide 1 UAVs are Here! Slide 2 Autonomy / Verification Context Damage-Tolerant Flight Controls Emergency Mission
W911NF Project - Mid-term Report
 W911NF-08-1-0041 Project - Mid-term Report Agent Technology Center, Czech Technical University in Prague Michal Pechoucek 1 Accomplishments for the First 6 Months 1.1 Scenario and Demos During the first
W911NF-08-1-0041 Project - Mid-term Report Agent Technology Center, Czech Technical University in Prague Michal Pechoucek 1 Accomplishments for the First 6 Months 1.1 Scenario and Demos During the first
TRUE OPERATIONS AUTOMATION: FROM A GEO FLEET TO A SINGLE LEO SATELLITE
 GSAW 2016 TRUE OPERATIONS AUTOMATION: FROM A GEO FLEET TO A SINGLE LEO SATELLITE GMV, 2016 Property of GMV All rights reserved Published by The Aerospace CHALLENGE Satellite operations are simple and can
GSAW 2016 TRUE OPERATIONS AUTOMATION: FROM A GEO FLEET TO A SINGLE LEO SATELLITE GMV, 2016 Property of GMV All rights reserved Published by The Aerospace CHALLENGE Satellite operations are simple and can
Hybrid Model: Overview
 Hybrid Model: Overview 1990 s saw evolution of architectures labeled reactive planning Developed in response to shortcomings of Reactive approach: Could not deal with problems that require cognitive activities
Hybrid Model: Overview 1990 s saw evolution of architectures labeled reactive planning Developed in response to shortcomings of Reactive approach: Could not deal with problems that require cognitive activities
Decision Support for Robotic and Autonomous Systems
 Decision Support for Robotic and Autonomous Systems 1. Introduction The rapid advancement of artificial intelligence, due to great expenditures by commercial firms and military research, brings promise
Decision Support for Robotic and Autonomous Systems 1. Introduction The rapid advancement of artificial intelligence, due to great expenditures by commercial firms and military research, brings promise
Paper Session I-A - Shuttle-C Heavy-Lift Vehicle of the 90's
 The Space Congress Proceedings 1989 (26th) Space - The New Generation Apr 25th, 2:00 PM Paper Session I-A - Shuttle-C Heavy-Lift Vehicle of the 90's Robert G. Eudy Manager, Shuttle-C Task Team, Marshall
The Space Congress Proceedings 1989 (26th) Space - The New Generation Apr 25th, 2:00 PM Paper Session I-A - Shuttle-C Heavy-Lift Vehicle of the 90's Robert G. Eudy Manager, Shuttle-C Task Team, Marshall
RPAS Swarms in Disaster Management Missions
 DLR.de Chart 1 RPAS Swarms in Disaster Management Missions Efficient Deployment through Optimized Mission Planning Julia Zillies, Dagi Geister DLR.de Chart 2 Introduction RPAS Deployment in Disaster Management
DLR.de Chart 1 RPAS Swarms in Disaster Management Missions Efficient Deployment through Optimized Mission Planning Julia Zillies, Dagi Geister DLR.de Chart 2 Introduction RPAS Deployment in Disaster Management
Low Power Long Life Radioisotope Power Systems
 Low Power Long Life Radioisotope Power Systems Robert L. Cataldo NASA Glenn Research Center Cleveland, OH 44116 LEAG Annual Meeting November 1-3, 2016 Columbia, MD Concept Motivation Investigate potential
Low Power Long Life Radioisotope Power Systems Robert L. Cataldo NASA Glenn Research Center Cleveland, OH 44116 LEAG Annual Meeting November 1-3, 2016 Columbia, MD Concept Motivation Investigate potential
MTFF Operational Design Features
 The Space Congress Proceedings 1987 (24th) Space - The Challenge, The Commitment Apr 1st, 8:00 AM MTFF Operational Design Features H. Friedrich MTFF Study Manager MBB/ERNO, Bremen/W. Germany A. J. Thirkettle
The Space Congress Proceedings 1987 (24th) Space - The Challenge, The Commitment Apr 1st, 8:00 AM MTFF Operational Design Features H. Friedrich MTFF Study Manager MBB/ERNO, Bremen/W. Germany A. J. Thirkettle
Functional Analysis Module
 CC532 Collaborate System Design Fundamentals of Systems Engineering W6, Spring, 2012 KAIST Functional Analysis Module Space Systems Engineering, version 1.0 Space Systems Engineering: Functional Analysis
CC532 Collaborate System Design Fundamentals of Systems Engineering W6, Spring, 2012 KAIST Functional Analysis Module Space Systems Engineering, version 1.0 Space Systems Engineering: Functional Analysis
Going to the Water. Challenges in Designing a Mission that Travels through Europa s Crust: Deployment, Operations, Communication
 Going to the Water Challenges in Designing a Mission that Travels through Europa s Crust: Deployment, Operations, Communication Tom Cwik Jet Propulsion Laboratory, California Institute of Technology. KISS
Going to the Water Challenges in Designing a Mission that Travels through Europa s Crust: Deployment, Operations, Communication Tom Cwik Jet Propulsion Laboratory, California Institute of Technology. KISS
RESEARCH ON THE DRONE TECHNOLOGY FOR THE ISS APPLICATION TAI NAKAMURA ASIAN INSTITUTE OF TECHNOLOGY JAPAN AEROSPACE EXPLORATION AGENCY
 RESEARCH ON THE DRONE TECHNOLOGY FOR THE ISS APPLICATION TAI NAKAMURA ASIAN INSTITUTE OF TECHNOLOGY JAPAN AEROSPACE EXPLORATION AGENCY CONTENTS Introduction Proposal of Space Drone Advantage of Drones
RESEARCH ON THE DRONE TECHNOLOGY FOR THE ISS APPLICATION TAI NAKAMURA ASIAN INSTITUTE OF TECHNOLOGY JAPAN AEROSPACE EXPLORATION AGENCY CONTENTS Introduction Proposal of Space Drone Advantage of Drones
Too often, we act as if we can confine requirements discovery to
 Analyzing anomalies An institutional, Web-based database contains the anomaly reports for the eight JPL spacecraft projects. Separate online forms exist for describing testing anomalies and operational
Analyzing anomalies An institutional, Web-based database contains the anomaly reports for the eight JPL spacecraft projects. Separate online forms exist for describing testing anomalies and operational
Emergent Planning with Philosophical Agents
 Emergent Planning with Philosophical Agents William Turkett, Jr. and John R. Rose Department of Computer Science and Engineering University of South Carolina Columbia, SC 29208 {turkett, rose}@cse.sc.edu
Emergent Planning with Philosophical Agents William Turkett, Jr. and John R. Rose Department of Computer Science and Engineering University of South Carolina Columbia, SC 29208 {turkett, rose}@cse.sc.edu
Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions
 Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions Allison Ryan July 22, 2004 The AINS Center for the Collaborative Control of Unmanned Vehicles 1 US Coast Guard Search and Rescue
Unmanned Aerial Vehicle Application to Coast Guard Search and Rescue Missions Allison Ryan July 22, 2004 The AINS Center for the Collaborative Control of Unmanned Vehicles 1 US Coast Guard Search and Rescue
Asteroid Mining Logistics
 Asteroid Mining Logistics Scott Dorrington PhD Candidate University of New South Wales School of Mechanical and Manufacturing Engineering/ Australian Centre for Space Engineering Research s.dorrington@unsw.edu.au
Asteroid Mining Logistics Scott Dorrington PhD Candidate University of New South Wales School of Mechanical and Manufacturing Engineering/ Australian Centre for Space Engineering Research s.dorrington@unsw.edu.au
Reusable Booster System (RBS)
") Reusable Booster System (RBS) Briefing to the Aeronautics and Space Engineering Board of the National Research Council Slater Voorhees, P.E. 28 March 2012 Copyright 2012 by Lockheed Martin Corporation,
Reusable Booster System (RBS) Briefing to the Aeronautics and Space Engineering Board of the National Research Council Slater Voorhees, P.E. 28 March 2012 Copyright 2012 by Lockheed Martin Corporation,
Requirements Specification
 Autonomous Minesweeper 206-2-2 Editor: Erik Bodin Version.3 Status Reviewed Erik Bodin 206-0-07 Approved Martin Lindfors 206-09-23 TSRT0 Page tsrt0-balrog@googlegroups.com Autonomous Minesweeper 206-2-2
Autonomous Minesweeper 206-2-2 Editor: Erik Bodin Version.3 Status Reviewed Erik Bodin 206-0-07 Approved Martin Lindfors 206-09-23 TSRT0 Page tsrt0-balrog@googlegroups.com Autonomous Minesweeper 206-2-2
Simulation based design & development of autonomous underwater vehicle IMGAM
 Simulation based design & development of autonomous underwater vehicle IMGAM Dr. Ing. Max Abildgaard a sound decision The ATLAS ELEKTRONIK Group/ 1 Introduction IMGAM (Intelligentes Monitoring von Gasaustritten
Simulation based design & development of autonomous underwater vehicle IMGAM Dr. Ing. Max Abildgaard a sound decision The ATLAS ELEKTRONIK Group/ 1 Introduction IMGAM (Intelligentes Monitoring von Gasaustritten
Europa Lander Pre-Phase A Study Report. Robert D. Braun September 12, 2018
 Europa Lander Pre-Phase A Study Report Robert D. Braun September 12, 2018 *Slides based on presentation provided to NASA SMD in November 2017 1 Introduction Europa Lander Mission Concept Review was conducted
Europa Lander Pre-Phase A Study Report Robert D. Braun September 12, 2018 *Slides based on presentation provided to NASA SMD in November 2017 1 Introduction Europa Lander Mission Concept Review was conducted
Kilopower. Powering a NASA Mission to Mars Frontiers in Science Public Lecture Series
 Kilopower Powering a NASA Mission to Mars Frontiers in Science Public Lecture Series Patrick McClure Dave Poston Los Alamos National Laboratory April, 2018 Operated by Los Alamos National Security, LLC
Kilopower Powering a NASA Mission to Mars Frontiers in Science Public Lecture Series Patrick McClure Dave Poston Los Alamos National Laboratory April, 2018 Operated by Los Alamos National Security, LLC
Using Artificial Intelligence Planning to Generate Antenna Tracking Plans
 From: IAAI-99 Proceedings. Copyright 1999, AAAI (www.aaai.org). All rights reserved. Using Artificial Intelligence Planning to Generate Antenna Tracking Plans Forest Fisher, Tara Estlin, Darren Mutz, and
From: IAAI-99 Proceedings. Copyright 1999, AAAI (www.aaai.org). All rights reserved. Using Artificial Intelligence Planning to Generate Antenna Tracking Plans Forest Fisher, Tara Estlin, Darren Mutz, and
Autonomous Swarms of High Speed Maneuvering Surface Vessels
 Central T&E Investment Program (CTEIP) Swarm Autonomy Autonomous Swarms of High Speed Maneuvering Surface Vessels Tyler Halpin-Chan 1, Varun Varahamurthy 1, Josh Vanderhook 2 December 12, 2018 1 Naval
Central T&E Investment Program (CTEIP) Swarm Autonomy Autonomous Swarms of High Speed Maneuvering Surface Vessels Tyler Halpin-Chan 1, Varun Varahamurthy 1, Josh Vanderhook 2 December 12, 2018 1 Naval
Deep Space Gateway and Journey To Mars Update
 National Aeronautics and Space Administration Deep Space Gateway and Journey To Mars Update Mark Geyer Deputy Associate Administrator (Acting) Human Exploration & Operations Mission Directorate Oct. 11,
National Aeronautics and Space Administration Deep Space Gateway and Journey To Mars Update Mark Geyer Deputy Associate Administrator (Acting) Human Exploration & Operations Mission Directorate Oct. 11,
What's next for ROS? ROSCon JP Tokyo, Japan September, 2018
 What's next for ROS? ROSCon JP Tokyo, Japan September, 2018 The Organization Open Robotics We support the development, distribution, and adoption of open software and hardware for use in robotics research,
What's next for ROS? ROSCon JP Tokyo, Japan September, 2018 The Organization Open Robotics We support the development, distribution, and adoption of open software and hardware for use in robotics research,
Planning strategy and supporting tools for the science operations of ESA s Planetary Science Missions
 Planning strategy and supporting tools for the science operations of ESA s Planetary Science Missions Raymond Hoofs 1,.Detlef Koschny 1, Peter van der Plas 2, 1 Planetary Missions Division, ESA/ESTEC,
Planning strategy and supporting tools for the science operations of ESA s Planetary Science Missions Raymond Hoofs 1,.Detlef Koschny 1, Peter van der Plas 2, 1 Planetary Missions Division, ESA/ESTEC,
Activity 3: The innovation game Duration: 30 minutes. Play the innovation game. Introduction. Show Lockheed Martin virtual fieldtrip video, Chapter 3.
 Activity 3: The innovation game Duration: 30 minutes Objective: To investigate and analyse a range of existing products and determine which designs have been influenced by the development of new technologies
Activity 3: The innovation game Duration: 30 minutes Objective: To investigate and analyse a range of existing products and determine which designs have been influenced by the development of new technologies
Mission Planning Systems for Earth Observation Missions
 Mission Planning Systems for Earth Observation Missions Marc Niezette Anite Systems GmbH Robert Bosch StraJ3e 7 Darmstadt, Germany Marc.Niezette@AniteSystems.de Abstract This paper describes two different
Mission Planning Systems for Earth Observation Missions Marc Niezette Anite Systems GmbH Robert Bosch StraJ3e 7 Darmstadt, Germany Marc.Niezette@AniteSystems.de Abstract This paper describes two different
BIG G 2 0 DEC 1967 MCDONNELL.
 BIG G 20 DEC 1967 MCDONNELL. DOUGL./XS CONSIDERATIONS Current published NASA plans encompass the development of the space technology and hardware for long duration earth orbital space stations and for
BIG G 20 DEC 1967 MCDONNELL. DOUGL./XS CONSIDERATIONS Current published NASA plans encompass the development of the space technology and hardware for long duration earth orbital space stations and for
Global Monitoring for Environment and Security
 Global Monitoring for Environment and Security Dr. Stephan Lechner Director Joint Research Centre The European Commission s in-house science service Serving society, stimulating innovation, supporting
Global Monitoring for Environment and Security Dr. Stephan Lechner Director Joint Research Centre The European Commission s in-house science service Serving society, stimulating innovation, supporting
TRAJECTORY ANALYSIS FOR THE HY-V SCRAMJET FLIGHT EXPERIMENT AND THE EFFECTS OF A RECOVERY SYSTEM
 TRAJECTORY ANALYSIS FOR THE HY-V SCRAMJET FLIGHT EXPERIMENT AND THE EFFECTS OF A RECOVERY SYSTEM Amanda I. Smith University of Virginia, Charlottesville, Virginia 22904 Dr. Christopher P. Goyne, Advisor
TRAJECTORY ANALYSIS FOR THE HY-V SCRAMJET FLIGHT EXPERIMENT AND THE EFFECTS OF A RECOVERY SYSTEM Amanda I. Smith University of Virginia, Charlottesville, Virginia 22904 Dr. Christopher P. Goyne, Advisor
CAT COMMAND FOR DRILLING
 CAT COMMAND FOR MAKING EVERY SHOT WORTH MORE Cost-effective, high-precision drilling gets your whole mining value chain off to a good start. Cat Command for drilling, a capability of the Cat MineStar technology
CAT COMMAND FOR MAKING EVERY SHOT WORTH MORE Cost-effective, high-precision drilling gets your whole mining value chain off to a good start. Cat Command for drilling, a capability of the Cat MineStar technology
Paper Session I-B - Industrial Reflight of Eureca Platform in 1998
 The Space Congress Proceedings 1996 (33rd) America's Space Program -What's Ahead? Apr 23rd, 2:00 PM - 5:00 PM Paper Session I-B - Industrial Reflight of Eureca Platform in 1998 Wolfram Lork Karl Hochgartz
The Space Congress Proceedings 1996 (33rd) America's Space Program -What's Ahead? Apr 23rd, 2:00 PM - 5:00 PM Paper Session I-B - Industrial Reflight of Eureca Platform in 1998 Wolfram Lork Karl Hochgartz
SPACE LAUNCH SYSTEM PROGRAM FLIGHT SOFTWARE BUILD CONTENT DEFINITION
 SLS-VDD-177 BASELINE National Aeronautics and Space Administration EFFECTIVE DATE: APRIL 12, 2013 SPACE LAUNCH SYSTEM PROGRAM FLIGHT SOFTWARE BUILD CONTENT DEFINITION Approved for Public Release; Distribution
SLS-VDD-177 BASELINE National Aeronautics and Space Administration EFFECTIVE DATE: APRIL 12, 2013 SPACE LAUNCH SYSTEM PROGRAM FLIGHT SOFTWARE BUILD CONTENT DEFINITION Approved for Public Release; Distribution
John Deere RGATOR TM. Feb 18, 2009 Bob Norris. w C
 John Deere RGATOR TM Feb 18, 2009 Bob Norris norriswilliamr@johndeere.com w - 704-587-2909 C - 704-607-2742 Agenda Design Concept Deployments System Capabilities and Missions Payloads Distinct Advantages
John Deere RGATOR TM Feb 18, 2009 Bob Norris norriswilliamr@johndeere.com w - 704-587-2909 C - 704-607-2742 Agenda Design Concept Deployments System Capabilities and Missions Payloads Distinct Advantages
Structural Optimization of Conceptual Aerospace Vehicles
 Structural Optimization of Conceptual Aerospace Vehicles Glenn Andrew Hrinda NASA Langley Research Center Abstract Aerospace vehicle structures must be optimized for mass to maximize the mission payload.
Structural Optimization of Conceptual Aerospace Vehicles Glenn Andrew Hrinda NASA Langley Research Center Abstract Aerospace vehicle structures must be optimized for mass to maximize the mission payload.
Cohesion, Power, Flexibility:
 Cohesion, Power, Flexibility: JPL Formulation MBSE Vision Kelley Case, John Ziemer, Bjorn Cole, James Chase, and Michael Kolar Jet Propulsion Laboratory, What would Team X look like if we invented it today?
Cohesion, Power, Flexibility: JPL Formulation MBSE Vision Kelley Case, John Ziemer, Bjorn Cole, James Chase, and Michael Kolar Jet Propulsion Laboratory, What would Team X look like if we invented it today?
Software Productivity Domains
 Workshop Notes Software Software Application Difficulties Very Easy Risks are well understood with little loss from failure Business or operational logic is straightforward Limited interface to other software
Workshop Notes Software Software Application Difficulties Very Easy Risks are well understood with little loss from failure Business or operational logic is straightforward Limited interface to other software
Operations of the SEIS seismometer onboard the 2016 InSight mission
 SpaceOps Conferences 16-20 May 2016, Daejeon, Korea SpaceOps 2016 Conference 10.2514/6.2016-2592 Operations of the SEIS seismometer onboard the 2016 InSight mission Charles Yana, Aurélie Moussi, Agnès
SpaceOps Conferences 16-20 May 2016, Daejeon, Korea SpaceOps 2016 Conference 10.2514/6.2016-2592 Operations of the SEIS seismometer onboard the 2016 InSight mission Charles Yana, Aurélie Moussi, Agnès
Operations of the SEIS seismometer onboard the 2016 InSight mission
 SpaceOps Conferences 16-20 May 2016, Daejeon, Korea SpaceOps 2016 Conference 10.2514/6.2016-2592 Operations of the SEIS seismometer onboard the 2016 InSight mission Charles Yana, Aurélie Moussi, Agnès
SpaceOps Conferences 16-20 May 2016, Daejeon, Korea SpaceOps 2016 Conference 10.2514/6.2016-2592 Operations of the SEIS seismometer onboard the 2016 InSight mission Charles Yana, Aurélie Moussi, Agnès
Define functional analysis and place it in context within system development. Describe the activities and value of functional analysis.
 Functional 1 Agenda Define functional analysis and place it in context within system development. Describe the activities and value of functional analysis. Describe, and illustrate with examples, two tools
Functional 1 Agenda Define functional analysis and place it in context within system development. Describe the activities and value of functional analysis. Describe, and illustrate with examples, two tools
DEVELOPING SAFETY-CRITICAL SOFTWARE REQUIREMENTS FOR COMMERCIAL REUSABLE LAUNCH VEHICLES
 DEVELOPING SAFETY-CRITICAL SOFTWARE REQUIREMENTS FOR COMMERCIAL REUSABLE LAUNCH VEHICLES Daniel P. Murray (1) and Terry L. Hardy (2) (1) Federal Aviation Administration, Office of Commercial Space Transportation,
DEVELOPING SAFETY-CRITICAL SOFTWARE REQUIREMENTS FOR COMMERCIAL REUSABLE LAUNCH VEHICLES Daniel P. Murray (1) and Terry L. Hardy (2) (1) Federal Aviation Administration, Office of Commercial Space Transportation,
AEM 5495 Spring Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs)
") AEM 5495 Spring 2011 Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs) Gary J. Balas balas@umn.edu Monday-Wednesday 3:35-4:50 PM 211 Akerman Hall UAV Course Syllabus
AEM 5495 Spring 2011 Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles (UAVs) Gary J. Balas balas@umn.edu Monday-Wednesday 3:35-4:50 PM 211 Akerman Hall UAV Course Syllabus
The Orion Spacecraft as a Key Element in a Deep Space Gateway
 The Orion Spacecraft as a Key Element in a Deep Space Gateway A Technical Paper Presented by: Timothy Cichan Lockheed Martin Space timothy.cichan@lmco.com Kerry Timmons Lockheed Martin Space scott.d.norris@lmco.com
The Orion Spacecraft as a Key Element in a Deep Space Gateway A Technical Paper Presented by: Timothy Cichan Lockheed Martin Space timothy.cichan@lmco.com Kerry Timmons Lockheed Martin Space scott.d.norris@lmco.com
VMware Network Virtualization Deploy Service
 DATA SHEET VMware Network Virtualization Deploy Service AT-A-GLANCE The primary objective of this service is a rapid installation, configuration, and high-level validation (deployment) of a reference design
DATA SHEET VMware Network Virtualization Deploy Service AT-A-GLANCE The primary objective of this service is a rapid installation, configuration, and high-level validation (deployment) of a reference design
Autonomous Underwater Vehicles
 Make in India Paradigm Roadmap for a Future Ready Naval Force Organized by FICCI in association with Indian Navy 18-19 April 2016 Autonomous Underwater Vehicles Dr. Manu Korulla AUV VISION Taking Man Out
Make in India Paradigm Roadmap for a Future Ready Naval Force Organized by FICCI in association with Indian Navy 18-19 April 2016 Autonomous Underwater Vehicles Dr. Manu Korulla AUV VISION Taking Man Out
DEMONSTRATING AUTONOMOUS MARS ROVER SCIENCE OPERATIONS IN THE ATACAMA DESERT.
 DEMONSTRATING AUTONOMOUS MARS ROVER SCIENCE OPERATIONS IN THE ATACAMA DESERT M. Woods (1), A. Shaw (1), I. Wallace (1), M. Malinowski (1) & P. Rendell (1) (1)SCISYS Ltd., 23 Clothier Rd., Bristol, UK e-mail:
DEMONSTRATING AUTONOMOUS MARS ROVER SCIENCE OPERATIONS IN THE ATACAMA DESERT M. Woods (1), A. Shaw (1), I. Wallace (1), M. Malinowski (1) & P. Rendell (1) (1)SCISYS Ltd., 23 Clothier Rd., Bristol, UK e-mail:
Software verification and validation. Introduction
 Software verification and validation. Introduction Marius Minea September 27, 2017 Topics be discussed Black-box testing (no source access) Glass-box/white-box testing (with source access) Generating unit
Software verification and validation. Introduction Marius Minea September 27, 2017 Topics be discussed Black-box testing (no source access) Glass-box/white-box testing (with source access) Generating unit
Lunar Polar Volatiles Explorer (LPVE) Mission Concept Study
 Mission Concept Study") Lunar Polar Volatiles Explorer (LPVE) Mission Concept Study Chip Shearer Science Champion cshearer@unm.edu George Tahu NASA HQ POC George.tahu@nasa.gov Lunar Polar Volatiles Explorer Mission Concept Study
Lunar Polar Volatiles Explorer (LPVE) Mission Concept Study Chip Shearer Science Champion cshearer@unm.edu George Tahu NASA HQ POC George.tahu@nasa.gov Lunar Polar Volatiles Explorer Mission Concept Study