An Ontology-based Model to Determine the Automation Level of an Automated Vehicle for Co-Driving
|
|
|
- Everett French
- 6 years ago
- Views:
Transcription



1 An Ontology-based Model to Determine the Automation Level of an Automated Vehicle for Co-Driving Evangeline POLLARD, Philippe MORIGNOT, Fawzi NASHASHIBI IMARA Paris Rocquencourt Fusion 13, Istanbul, July 10, 2013

2 Perception sensors Intelligent vehicle + low cost production = processing unit GPS actuators HMI laser camera radar gyrometer accelerometer odometer Data fusion techniques exteroceptif proprioceptif
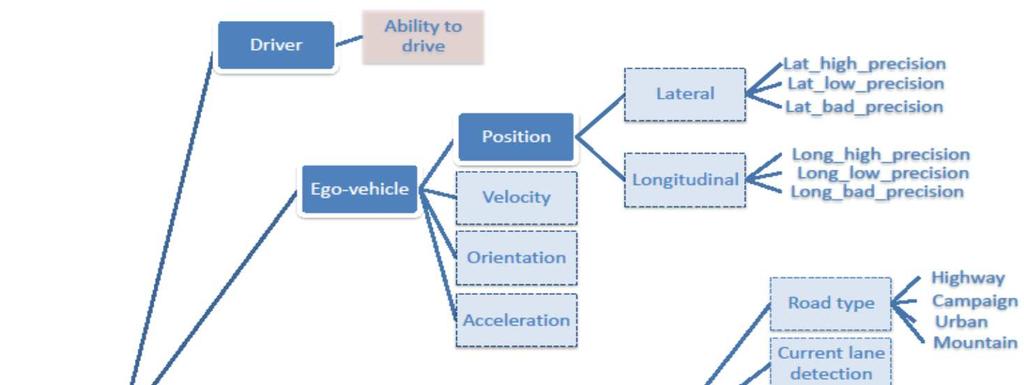
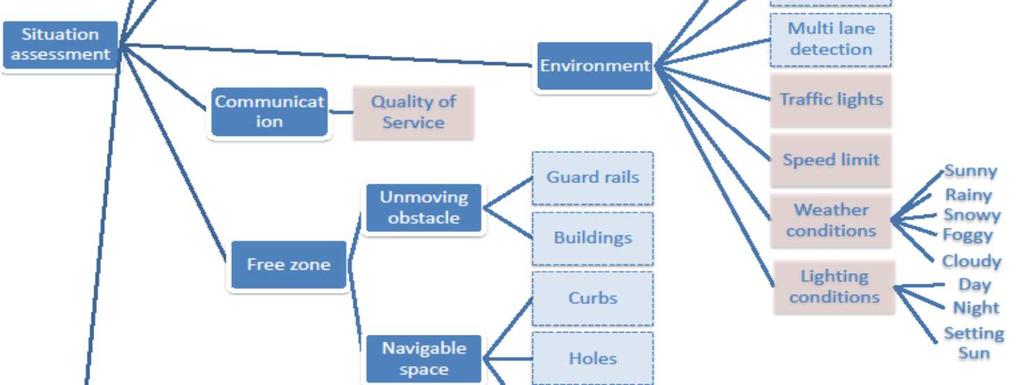
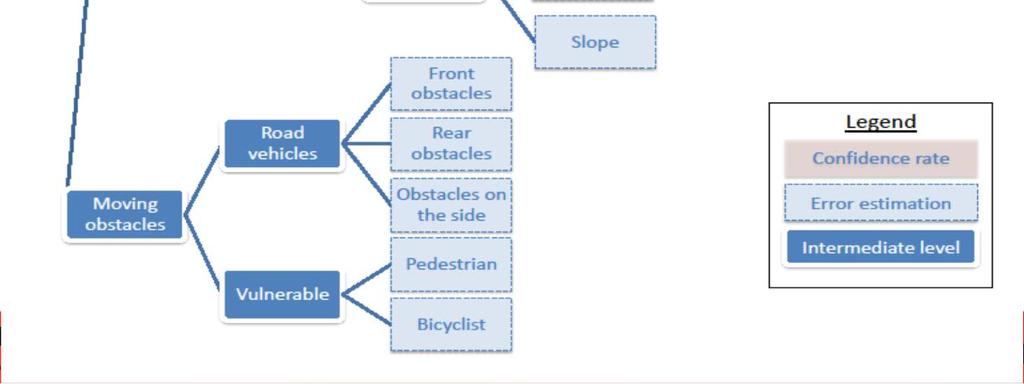
3 Situation assessment camera X com model scene obstacles ego-vehicle environment laser Y




4 Autonomous driving 90 s: Cybercar concept 97: automatic shuttle at Shilport airport 2010: Vislab challenge 2007: Junior 2013: Link&Go vehicle



5 Goal: Demonstratethe technicalfeasibilityof fully automated driving at speeds below 50km/h on controlled infrastructures Means: Lane detection Obstacle detection and tracking Lane keeping system ACC -5


6 The final demonstration of ABV Votre facture du mois de juillet est de euros. Veuillez contacter votre service client. Your internet bill is euros. Please contact your customer service
7 Motivation Sensors have predefined operating range and are not free of breakdowns full automated driving cannot be ensured yet at once in all situations self-assessment of the perception abilities
8 Outline Ontologydescription Automation spectrum Situation assessment Conclusion
9 Outline Ontologydescription Automation spectrum Situation assessment Conclusion
10 Ontology description Knowledge representation: «A specificationof conceptualizationof a domain knowledge» [Gruber 92] A complete semantic network. Classes, individuals, properties. Tools embed an inference mechanism.
11 Outline Ontologydescription Automation spectrum Situation assessment Conclusion
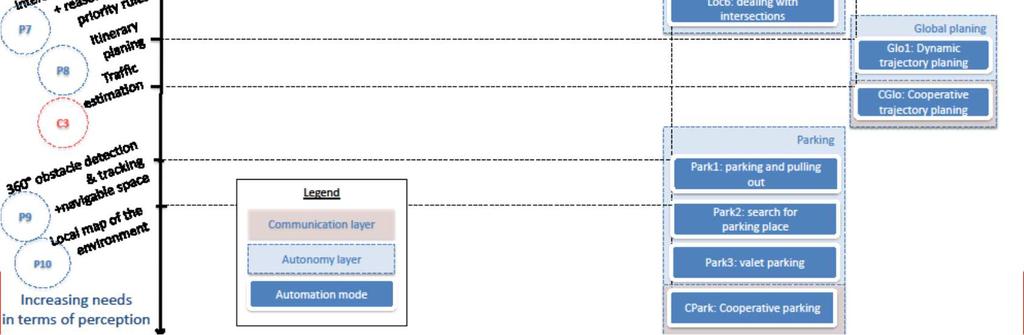
12 Automation spectrum 5 automation layers have been defined: Longitudinal Lateral Local planning Global planning Parking
13 Longitudinal control layer 0: fully driving Levels of automation in terms of decisions to make about P2 P1 Long1: Cruise control Long2: Dynamic Set Speed Type Longitudinal control P3 C1 Long3: Autonomous CC Long4: Stop&Go CLong: Cooperative cruise control communication Increasing needs in terms of perception and communication


14
15 Logical rules for automation spectrum Non-communicative vehicles Communicative vehicles
16 Outline Ontologydescription Automation spectrum Situation assessment Conclusion
17 Situation assessment
18 Logical rules depending on weather conditions Maximum automation level Front obstacle detection Ego-lane estimation Speed limit estimation
19 Combining with the current driver state Highest automation mode measured by the system (without driver consideration) Highest automation mode measured by the system (with driver consideration) In this case, an alert is given to the driver to give him more control back.
20 Conclusion An ontologyon automation layersand an ontologyon situation assessment, for co-driving(its). Inference rules to infer the former given the latter. Implementation: Classes /properties in OWL using PROTÉGÉ rules in SWRL using PELLET. Future work: betterrepresentationof rules(e.g., negation) and individuals(e.g., floatnumbers); porting on CyberCars(RTMaps and MySQL).



21 Thank you! Contacts : Evangeline POLLARD Evangeline.pollard@inria.fr imara.inria.fr
Arbitration for balancing control between the driver and ADAS systems in an automated vehicle: Survey and approach
 Arbitration for balancing control between the driver and ADAS systems in an automated vehicle: Survey and approach Philippe Morignot, Joshué Pérez Rastelli, Fawzi Nashashbi To cite this version: Philippe
Arbitration for balancing control between the driver and ADAS systems in an automated vehicle: Survey and approach Philippe Morignot, Joshué Pérez Rastelli, Fawzi Nashashbi To cite this version: Philippe
Cooperative maneuvering in road traffic
 Cooperative maneuvering in road traffic ISN Conference 2014 Jeroen Ploeg Outline Introduction & motivation Cooperative Adaptive Cruise Control Cooperative maneuvering Design approach Interaction protocol
Cooperative maneuvering in road traffic ISN Conference 2014 Jeroen Ploeg Outline Introduction & motivation Cooperative Adaptive Cruise Control Cooperative maneuvering Design approach Interaction protocol
Software Framework for Highly Automated Driving EB robinos. Jared Combs July 27, 2017
 Software Framework for Highly Automated Driving EB robinos Jared Combs July 27, 2017 Radar Camera LIDAR Sonar Steering Wheel Sensors 30 25 20 15 10 Wheel Speeds IMU / Gyro 5 0 Global Position 1999: Mercedes
Software Framework for Highly Automated Driving EB robinos Jared Combs July 27, 2017 Radar Camera LIDAR Sonar Steering Wheel Sensors 30 25 20 15 10 Wheel Speeds IMU / Gyro 5 0 Global Position 1999: Mercedes
DNA for Automated Driving. Jeremy Dahan May 8 th, 2017
 Jeremy Dahan May 8 th, 2017 Radar Camera LIDAR Sonar Steering Wheel Sensors 30 25 20 15 10 Wheel Speeds IMU / Gyro 5 0 Global Position 1999: Mercedes S-Class Distronic 2002: VW Phaeton ACC Moving objects
Jeremy Dahan May 8 th, 2017 Radar Camera LIDAR Sonar Steering Wheel Sensors 30 25 20 15 10 Wheel Speeds IMU / Gyro 5 0 Global Position 1999: Mercedes S-Class Distronic 2002: VW Phaeton ACC Moving objects
AVL List GmbH (Headquarters) Autonomous Driving. Validation and Testing - Challenges. Dr. Mihai Nica, Hermann Felbinger. Public
 Autonomous Driving. Validation and Testing - Challenges. Dr. Mihai Nica, Hermann Felbinger. Public") AVL List GmbH (Headquarters) Autonomous Driving Validation and Testing - Challenges Dr. Mihai Nica, Hermann Felbinger Our Experience for your Success AVL achieves unique results in regards to the development
AVL List GmbH (Headquarters) Autonomous Driving Validation and Testing - Challenges Dr. Mihai Nica, Hermann Felbinger Our Experience for your Success AVL achieves unique results in regards to the development
Solutions.
 Products Services Software Platforms Data Intelligence Solutions www.autonomoustuff.com About AutonomouStuff Innovative Products www.autonomoustuff.com/products AutonomouStuff is the world s leader in
Products Services Software Platforms Data Intelligence Solutions www.autonomoustuff.com About AutonomouStuff Innovative Products www.autonomoustuff.com/products AutonomouStuff is the world s leader in
From Advanced Active Safety Systems to Automated Systems: From to and beyond. Dr. Angelos Amditis Research Director I-Sense, ICCS
 From Advanced Active Safety Systems to Automated Systems: From to and beyond Dr. Angelos Amditis Research Director I-Sense, ICCS Contents o Introduction o Motivation o Levels of automation o Evolution
From Advanced Active Safety Systems to Automated Systems: From to and beyond Dr. Angelos Amditis Research Director I-Sense, ICCS Contents o Introduction o Motivation o Levels of automation o Evolution
LaRA Update The French Program La Route Automatisée
 LaRA Update The French Program La Route Automatisée J.M. Blosseville S. Mammar LaRA : a partnership, a new dedicated lab An umbrella for 5 research institutes and engineering schools : INRETS, LCPC, INRIA,
LaRA Update The French Program La Route Automatisée J.M. Blosseville S. Mammar LaRA : a partnership, a new dedicated lab An umbrella for 5 research institutes and engineering schools : INRETS, LCPC, INRIA,
Collaborative Research for Safe Connected Automated Driving AMAA Conference, Berlin
 Collaborative Research for Safe Connected Automated Driving AMAA Conference, Berlin September 26, 2017 On the road In the city Off road At sea 2 2017-09-26 With the customer in focus Improving fuel efficiency
Collaborative Research for Safe Connected Automated Driving AMAA Conference, Berlin September 26, 2017 On the road In the city Off road At sea 2 2017-09-26 With the customer in focus Improving fuel efficiency
Automation in the long-haul Challenges and opportunities of autonomous heavy-duty trucking in the U.S.
 Automation in the long-haul Challenges and opportunities of autonomous heavy-duty trucking in the U.S. Ben Sharpe, PhD 3 Revolutions Policy Conference Univ. of California, Davis February 26, 2018 Outline
Automation in the long-haul Challenges and opportunities of autonomous heavy-duty trucking in the U.S. Ben Sharpe, PhD 3 Revolutions Policy Conference Univ. of California, Davis February 26, 2018 Outline
Toward a Reasoning Service to Improve Routable Road Maps by Deriving Road Attributes from Telematics Data
 Toward a Reasoning Service to Improve Routable Road Maps by Deriving Road Attributes from Telematics Data Johannes Lauer 1, Mohamed Bakillah 1, 2, Steve H.L. Liang 2, Alexander Zipf 1 1 University Heidelberg,
Toward a Reasoning Service to Improve Routable Road Maps by Deriving Road Attributes from Telematics Data Johannes Lauer 1, Mohamed Bakillah 1, 2, Steve H.L. Liang 2, Alexander Zipf 1 1 University Heidelberg,
Driver Assistance and Autonomous Driving
 Driver Assistance and Autonomous Driving Opportunities, Challenges, Solutions New levels at comfort, safety & efficiency Peter Schoeggl, Mario Oswald, Rainer Voegl, Philipp Clement, Michael Stolz, Erich
Driver Assistance and Autonomous Driving Opportunities, Challenges, Solutions New levels at comfort, safety & efficiency Peter Schoeggl, Mario Oswald, Rainer Voegl, Philipp Clement, Michael Stolz, Erich
A Classification of Driver Assistance Systems
 International Conference Artificial Intelligence, Intelligent Transport Systems 25-28 May 2016, Brest, Belarus A Classification of Driver Assistance Systems George Yannis, Professor Costas Antoniou, Associate
International Conference Artificial Intelligence, Intelligent Transport Systems 25-28 May 2016, Brest, Belarus A Classification of Driver Assistance Systems George Yannis, Professor Costas Antoniou, Associate
SMART SMart Automation of Rail Transport
 Shift Freight to Rail: Midterm Event for S2R Projects from Call 2015-2016 & Final Event for Smart-Rail Lighthouse Project Vienna, 18 April 2018 SMART SMart Automation of Rail Transport Ristić-Durrant Danijela,
Shift Freight to Rail: Midterm Event for S2R Projects from Call 2015-2016 & Final Event for Smart-Rail Lighthouse Project Vienna, 18 April 2018 SMART SMart Automation of Rail Transport Ristić-Durrant Danijela,
Land Transport Weather Services Value Creation for the Mobility System
 Land Transport Weather Services Value Creation for the Mobility System WMO ad hoc expert group meeting, 28-Jan-2015 Dr. Pekka Leviäkangas Principal scientist, VTT Research professor, Univ. Of Oulu Example:
Land Transport Weather Services Value Creation for the Mobility System WMO ad hoc expert group meeting, 28-Jan-2015 Dr. Pekka Leviäkangas Principal scientist, VTT Research professor, Univ. Of Oulu Example:
Spanish Initiative for the Automation in Urban Transport: AutoMOST
 Journal of Transportation Technologies, 2018, 8, 1-10 http://www.scirp.org/journal/jtts ISSN Online: 2160-0481 ISSN Print: 2160-0473 Spanish Initiative for the Automation in Urban Transport: AutoMOST Jesús
Journal of Transportation Technologies, 2018, 8, 1-10 http://www.scirp.org/journal/jtts ISSN Online: 2160-0481 ISSN Print: 2160-0473 Spanish Initiative for the Automation in Urban Transport: AutoMOST Jesús
Connected and Automated Trucks: What and When?
 Connected and Automated Trucks: What and When? Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley International Urban Freight Conference Long Beach, October 18, 2017
Connected and Automated Trucks: What and When? Steven E. Shladover, Sc.D. California PATH Program University of California, Berkeley International Urban Freight Conference Long Beach, October 18, 2017
Roadmap towards autonomous ships
 Roadmap towards autonomous ships Morten Skogvold TPM, Autonomous Navigation System Innovasjonskonferansen e-nav.no 2018 Oslo, 12.9.2018 2018 Rolls-Royce plc The information in this document is the property
Roadmap towards autonomous ships Morten Skogvold TPM, Autonomous Navigation System Innovasjonskonferansen e-nav.no 2018 Oslo, 12.9.2018 2018 Rolls-Royce plc The information in this document is the property
Development of a Cooperative Tractor-Implement Combination
 Development of a Cooperative Tractor-Implement Combination While driver assistance systems such as adaptive cruise control and lane-keeping assistants are increasingly handling longitudinal and lateral
Development of a Cooperative Tractor-Implement Combination While driver assistance systems such as adaptive cruise control and lane-keeping assistants are increasingly handling longitudinal and lateral
It s all about safety and validation
 It s all about safety and validation Dr. Karl-Heinz Glander ZF DivA GEE ADAS Function & Algorithm Internal Agenda 1. Motivation 2. Introduction into ISO DPAS 21448 (SOTIF, Safety Of The Intended Functionality)
It s all about safety and validation Dr. Karl-Heinz Glander ZF DivA GEE ADAS Function & Algorithm Internal Agenda 1. Motivation 2. Introduction into ISO DPAS 21448 (SOTIF, Safety Of The Intended Functionality)
Vehicle Networks. The Networked Car. Univ.-Prof. Dr. Thomas Strang, Dipl.-Inform. Matthias Röckl
 Vehicle Networks The Networked Car Univ.-Prof. Dr. Thomas Strang, Dipl.-Inform. Matthias Röckl Outline Intelligent Transportation Systems Transportation: Today Tomorrow Applications Intra-vehicle Communications
Vehicle Networks The Networked Car Univ.-Prof. Dr. Thomas Strang, Dipl.-Inform. Matthias Röckl Outline Intelligent Transportation Systems Transportation: Today Tomorrow Applications Intra-vehicle Communications
Autonomous Vehicle WHITE paper
 www.hcltech.com Autonomous Vehicle WHITE paper Table of Contents Abstract Abbreviations Market Trends and Challenges Solution Best Practices Conclusion Reference Author Info 3 3 4 4 9 10 10 10 Abstract
www.hcltech.com Autonomous Vehicle WHITE paper Table of Contents Abstract Abbreviations Market Trends and Challenges Solution Best Practices Conclusion Reference Author Info 3 3 4 4 9 10 10 10 Abstract
Intelligent Transportation Systems. ICT for Transportation. Prof. Dr. Thomas Strang
 Intelligent Transportation Systems ICT for Transportation Prof. Dr. Thomas Strang Mobility Vital to Modern Societies Reflecting economic concerns of industry and trade Transport providing more than 18
Intelligent Transportation Systems ICT for Transportation Prof. Dr. Thomas Strang Mobility Vital to Modern Societies Reflecting economic concerns of industry and trade Transport providing more than 18
Software Requirements Specification (SRS) Automated Pedestrian Collision Avoidance System (APCA)
 Automated Pedestrian Collision Avoidance System (APCA)") Software Requirements Specification (SRS) Automated Pedestrian Collision Avoidance System (APCA) Authors: Team GReEN; Garret Smith, Rebecca Collins, Eric Austin, Nikhil Andrews Customer: Mr. David Agnew,
Software Requirements Specification (SRS) Automated Pedestrian Collision Avoidance System (APCA) Authors: Team GReEN; Garret Smith, Rebecca Collins, Eric Austin, Nikhil Andrews Customer: Mr. David Agnew,
elektrobit.com Driver assistance software EB Assist solutions
 elektrobit.com Driver assistance software EB Assist solutions From driver assistance systems to automated driving Automated driving leads to more comfortable driving and makes the road safer and more secure.
elektrobit.com Driver assistance software EB Assist solutions From driver assistance systems to automated driving Automated driving leads to more comfortable driving and makes the road safer and more secure.
European Truck Platooning Challenge (pilot) 2016
 2016") European Truck Platooning Challenge (pilot) 2016 Shipper s viewpoint Truck platooning comprises of a number of trucks closely following each other. This forms a platoon with several trucks reciprocally
European Truck Platooning Challenge (pilot) 2016 Shipper s viewpoint Truck platooning comprises of a number of trucks closely following each other. This forms a platoon with several trucks reciprocally
Dipl.-Ing. Felix Lotz. System Architecture & Behavior Planning
 Dipl.-Ing. Felix Lotz System Architecture & Behavior Planning 2 System Architecture & Behavior Planning Agenda Motivation and Challenges of Architecture Design PRORETA 3 Functional Architecture Insight
Dipl.-Ing. Felix Lotz System Architecture & Behavior Planning 2 System Architecture & Behavior Planning Agenda Motivation and Challenges of Architecture Design PRORETA 3 Functional Architecture Insight
Introduction to Transportation Systems
 Introduction to Transportation Systems 1 PART III: TRAVELER TRANSPORTATION 2 Chapter 24: Intelligent Transportation Systems (ITS) 3 Introduction ITS combines high technology and improvements in information
Introduction to Transportation Systems 1 PART III: TRAVELER TRANSPORTATION 2 Chapter 24: Intelligent Transportation Systems (ITS) 3 Introduction ITS combines high technology and improvements in information
Development of a Cooperative Tractor-Implement Combination
 Technical Article Development of a Cooperative Tractor-Implement Combination While driver assistance systems such as adaptive cruise control and lane-keeping assistants are increasingly handling longitudinal
Technical Article Development of a Cooperative Tractor-Implement Combination While driver assistance systems such as adaptive cruise control and lane-keeping assistants are increasingly handling longitudinal
From: Michael L. Sena To: Nick Bradley Ref: Safe Operation of Large Vehicles through Map-based ADAS Re: Proposed Article for Vision Zero
 15 August 2009 From: Michael L. Sena To: Nick Bradley Ref: Safe Operation of Large Vehicles through Map-based ADAS Re: Proposed Article for Vision Zero SAFE OPERATION OF LARGE VEHICLES THROUGH MAP-BASED
15 August 2009 From: Michael L. Sena To: Nick Bradley Ref: Safe Operation of Large Vehicles through Map-based ADAS Re: Proposed Article for Vision Zero SAFE OPERATION OF LARGE VEHICLES THROUGH MAP-BASED
The challenge of embracing the potential of multiple data sources for 2030 agenda
 The challenge of embracing the potential of multiple data sources for 2030 agenda UN Friday seminar on emerging issues 4 Mar 2016, New York Mariana Kotzeva Deputy Director General, INNOVATIONS Drivers
The challenge of embracing the potential of multiple data sources for 2030 agenda UN Friday seminar on emerging issues 4 Mar 2016, New York Mariana Kotzeva Deputy Director General, INNOVATIONS Drivers
Code of Practice for development, validation and market introduction of ADAS
 Code of Practice for development, validation and market introduction of ADAS Dr. Juergen Schwarz (DaimlerChrysler AG) RESPONSE 3, München, 04.04. 2006 1 Consortium Partner RESPONSE 3, München, 04.04. 2006
Code of Practice for development, validation and market introduction of ADAS Dr. Juergen Schwarz (DaimlerChrysler AG) RESPONSE 3, München, 04.04. 2006 1 Consortium Partner RESPONSE 3, München, 04.04. 2006
CS:4420 Artificial Intelligence
 CS:4420 Artificial Intelligence Spring 2017 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2004 17, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
CS:4420 Artificial Intelligence Spring 2017 Intelligent Agents Cesare Tinelli The University of Iowa Copyright 2004 17, Cesare Tinelli and Stuart Russell a a These notes were originally developed by Stuart
FOREST HARVESTING TRENDS & NEW TECHNOLOGIES
 1 FOREST HARVESTING TRENDS & NEW TECHNOLOGIES December 6, 2018 Mathieu Blouin Copie et redistribution interdites. Copying and redistribution prohibited. PRESENTATION OUTLINE 2 01 02 03 04 05 ABOUT US TRENDS
1 FOREST HARVESTING TRENDS & NEW TECHNOLOGIES December 6, 2018 Mathieu Blouin Copie et redistribution interdites. Copying and redistribution prohibited. PRESENTATION OUTLINE 2 01 02 03 04 05 ABOUT US TRENDS
SMART 64 DEFINITION OF NECESSARY VEHICLE AND INFRASTRUCTURE SYSTEMS FOR AUTOMATED DRIVING Project period: January June 2011 TNO, University of
 SMART 64 DEFINITION OF NECESSARY VEHICLE AND INFRASTRUCTURE SYSTEMS FOR AUTOMATED DRIVING Project period: January June 2011 TNO, University of Southampton, DLR, Tecnalia, Frost & Sullivan Henning Mosebach,
SMART 64 DEFINITION OF NECESSARY VEHICLE AND INFRASTRUCTURE SYSTEMS FOR AUTOMATED DRIVING Project period: January June 2011 TNO, University of Southampton, DLR, Tecnalia, Frost & Sullivan Henning Mosebach,
Executive Summary. Revision chart and history log "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" Contract B-0068-GEM3-GC
 Contract B-0068-GEM3-GC") Project "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" under Contract B-0068-GEM3-GC Executive Summary Period covered: 04.08.09 31.05.10 Issue Date: 30.06.2010 Start date of project: 04.08.09 Duration: 9 months
Project "UNMANNED GROUND TACTICAL VEHICLE (UGTV)" under Contract B-0068-GEM3-GC Executive Summary Period covered: 04.08.09 31.05.10 Issue Date: 30.06.2010 Start date of project: 04.08.09 Duration: 9 months
Driving Innovation in the Smart Car
 Driving Innovation in the Smart Car In the last decade, cars have evolved from just being connected to becoming smart. The car has become intelligent and, soon, autonomous cars will be able to think and
Driving Innovation in the Smart Car In the last decade, cars have evolved from just being connected to becoming smart. The car has become intelligent and, soon, autonomous cars will be able to think and
MathWorks Vision for Systematic Verification and Validation
 MathWorks Vision for Systematic Verification and Validation Bill Aldrich Senior Development Manager Simulink Verification and Validation, Simulink Design Verifier 2016 The MathWorks, Inc. 1 Growing Complexity
MathWorks Vision for Systematic Verification and Validation Bill Aldrich Senior Development Manager Simulink Verification and Validation, Simulink Design Verifier 2016 The MathWorks, Inc. 1 Growing Complexity
How to make a complete hazard analysis and risk assessment for autonomous vehicles?
 1 How to make a complete hazard analysis and risk assessment for autonomous vehicles? FUSE Final Seminar 2016-09-23 2 From driver assistance to driver replacement Driving on highway- ADAS Driving on highway-ad
1 How to make a complete hazard analysis and risk assessment for autonomous vehicles? FUSE Final Seminar 2016-09-23 2 From driver assistance to driver replacement Driving on highway- ADAS Driving on highway-ad
Key Concepts of ARC-IT
 Key Concepts of ARC-IT The Architecture Reference for Cooperative and Intelligent Transportation (ARC-IT) provides a common framework for planning, defining, and integrating intelligent transportation
Key Concepts of ARC-IT The Architecture Reference for Cooperative and Intelligent Transportation (ARC-IT) provides a common framework for planning, defining, and integrating intelligent transportation
QUAD CITIES MANUFACTURING INNOVATION HUB DIGITAL B2B USERS GROUP
 IoT OEM, Channel, Customer Collaboration QUAD CITIES MANUFACTURING INNOVATION HUB DIGITAL B2B USERS GROUP Tom Trone Illinois State University College of Business September 11, 2017 College of Business
IoT OEM, Channel, Customer Collaboration QUAD CITIES MANUFACTURING INNOVATION HUB DIGITAL B2B USERS GROUP Tom Trone Illinois State University College of Business September 11, 2017 College of Business
Assessment of automated driving to design infrastructure-assisted driving at transition areas
 Assessment of automated driving to design infrastructure-assisted driving at transition areas Dr. Jaap Vreeswijk, MAP traffic management, the Netherlands Tokyo, Japan, November 13-15, 2018 Impact Assessment.
Assessment of automated driving to design infrastructure-assisted driving at transition areas Dr. Jaap Vreeswijk, MAP traffic management, the Netherlands Tokyo, Japan, November 13-15, 2018 Impact Assessment.
ITS Action Plan- Internet Consultation
 ITS Action Plan- Internet Consultation * What are Intelligent transport Systems (ITS)? Intelligent Transport Systems (ITS) are generally defined as a collection of applications and services based on advanced
ITS Action Plan- Internet Consultation * What are Intelligent transport Systems (ITS)? Intelligent Transport Systems (ITS) are generally defined as a collection of applications and services based on advanced
Application of Artificial Intelligence Detection System Based on Multi-sensor Data Fusion
 Application of Artificial Intelligence Detection System Based on Multi-sensor Data Fusion https://doi.org/10.3991/ijoe.v14i06.8696 Meifang Han Weifang University of Science and Technology, Shandong, China
Application of Artificial Intelligence Detection System Based on Multi-sensor Data Fusion https://doi.org/10.3991/ijoe.v14i06.8696 Meifang Han Weifang University of Science and Technology, Shandong, China
S. Ishak. Wednesday, September 14, 2011
 S. Ishak Wednesday, September 14, 2011 Introduction Large amounts of ITS data from surveillance and monitoring systems Data supports traffic management functions such as travel time estimation / prediction,
S. Ishak Wednesday, September 14, 2011 Introduction Large amounts of ITS data from surveillance and monitoring systems Data supports traffic management functions such as travel time estimation / prediction,
VTT and 5G for Smart Mobility. 5G Techritory Sept. 28th, 2018 Tauno Vähä-Heikkilä Vice President, Connectivity
 VTT and 5G for Smart Mobility 5G Techritory Sept. 28th, 2018 Tauno Vähä-Heikkilä Vice President, Connectivity Smart Mobility? http://www.newsweek.com/2015/04/17/flying-carsare-coming-do-you-really-want-one-319639.html
VTT and 5G for Smart Mobility 5G Techritory Sept. 28th, 2018 Tauno Vähä-Heikkilä Vice President, Connectivity Smart Mobility? http://www.newsweek.com/2015/04/17/flying-carsare-coming-do-you-really-want-one-319639.html
Role of Automation in Traffic Management: Towards a digital infrastructure and classification of infrastructure
 Role of Automation in Traffic Management: Towards a digital infrastructure and classification of infrastructure November 2017 Table of Contents 1. Introduction... 2 2. Digital infrastructure requirements...
Role of Automation in Traffic Management: Towards a digital infrastructure and classification of infrastructure November 2017 Table of Contents 1. Introduction... 2 2. Digital infrastructure requirements...
Safer travel, faster arrival siemens.com/mobility
 Sitraffic Conduct+ Highway Management System Safer travel, faster arrival siemens.com/mobility Less congestion. Fewer accidents. Higher capacity. 2 Wherever overhead gantries display situation-tailored
Sitraffic Conduct+ Highway Management System Safer travel, faster arrival siemens.com/mobility Less congestion. Fewer accidents. Higher capacity. 2 Wherever overhead gantries display situation-tailored
A Strategy for Assessing Safe Use of Sensors in Autonomous Road Vehicles
 Authors' version for self-archiving A Strategy for Assessing Safe Use of Sensors in Autonomous Road Vehicles Rolf Johansson 1,2, Samieh Alissa 3, Staffan Bengtsson 4, Carl Bergenhem 5, Olof Bridal 6, Anders
Authors' version for self-archiving A Strategy for Assessing Safe Use of Sensors in Autonomous Road Vehicles Rolf Johansson 1,2, Samieh Alissa 3, Staffan Bengtsson 4, Carl Bergenhem 5, Olof Bridal 6, Anders
Real-Time Monitoring System
 Real-Time Monitoring System The University of Oklahoma Hazem Refai, Ph.D. NATMEC June 5, 2012 Dallas, TX Outline: Motivation Brief Review of FHWA Section 1201 Real-Time System Management Information Program
Real-Time Monitoring System The University of Oklahoma Hazem Refai, Ph.D. NATMEC June 5, 2012 Dallas, TX Outline: Motivation Brief Review of FHWA Section 1201 Real-Time System Management Information Program
5G-based Driving Assistance for Autonomous Vehicles CMCC ZENGFENG
 5G-based Driving Assistance for Autonomous Vehicles CMCC ZENGFENG 2018.6 1 China Mobile's 5G development layout and plan 2013 2014 2015 2016 2017 2018 2019 2020 Strategy Basic Needs and Objective Technology
5G-based Driving Assistance for Autonomous Vehicles CMCC ZENGFENG 2018.6 1 China Mobile's 5G development layout and plan 2013 2014 2015 2016 2017 2018 2019 2020 Strategy Basic Needs and Objective Technology
CENTRAL FLORIDA S AUTOMATED VEHICLE OPPORTUNITIES
 Florida Department of TRANSPORTATION CENTRAL FLORIDA AV PARTNERSHIP City of Orlando University of Central Florida Florida Polytechnic University FAMU-FSU College of Engineering Florida s Turnpike Enterprise
Florida Department of TRANSPORTATION CENTRAL FLORIDA AV PARTNERSHIP City of Orlando University of Central Florida Florida Polytechnic University FAMU-FSU College of Engineering Florida s Turnpike Enterprise
Building a Safety Case for Automated Mobility: Smart Cities and Autonomous Mobility Getting There Safely
 Building a Safety Case for Automated Mobility: Smart Cities and Autonomous Mobility Getting There Safely Building a Safety Case for Automated Mobility: Smart Cities and Autonomous Mobility Getting There
Building a Safety Case for Automated Mobility: Smart Cities and Autonomous Mobility Getting There Safely Building a Safety Case for Automated Mobility: Smart Cities and Autonomous Mobility Getting There
gate Gate automation solutions in ports and dry ports
 gate Gate automation solutions in ports and dry ports www.aitek.it Automated transit control Sesamo-Gate platform provides solutions for the management of control procedures for vehicles and containers
gate Gate automation solutions in ports and dry ports www.aitek.it Automated transit control Sesamo-Gate platform provides solutions for the management of control procedures for vehicles and containers
Developing Safe Autonomous Vehicles for Innovative Transportation Experiences
 Developing Safe Autonomous Vehicles for Innovative Transportation Experiences CIMdata Commentary Key takeaways: Siemens PLM Software (Siemens) has a deep understanding of the verification and validation
Developing Safe Autonomous Vehicles for Innovative Transportation Experiences CIMdata Commentary Key takeaways: Siemens PLM Software (Siemens) has a deep understanding of the verification and validation
Cooperative ITS facilities for automated driving
 Cooperative ITS facilities for automated driving Laurens Hobert / Hitachi AutoNet2030 overview Project full title: Coordinator: Project partners: Co-operative Systems in Support of Networked Automated
Cooperative ITS facilities for automated driving Laurens Hobert / Hitachi AutoNet2030 overview Project full title: Coordinator: Project partners: Co-operative Systems in Support of Networked Automated
Mirasys Video Management System meets banks and financial institutions requirements
 Mirasys Video Management System meets banks and financial institutions requirements Published on 3 Apr 2018 Banks and financial institutions have more complex and diverse requirements for video surveillance
Mirasys Video Management System meets banks and financial institutions requirements Published on 3 Apr 2018 Banks and financial institutions have more complex and diverse requirements for video surveillance
Multi-modality assessments in promoting sustainable urban traffic
 Juha Hulkkonen Climate Neutral Cities, 23rd September 2009, Geneva Multi-modality assessments in promoting sustainable urban traffic Table of contents Multimodal transport maturity assessment model Project
Juha Hulkkonen Climate Neutral Cities, 23rd September 2009, Geneva Multi-modality assessments in promoting sustainable urban traffic Table of contents Multimodal transport maturity assessment model Project
S6 AGVS Drive-Under Tractor
 2015 S6 AGVS Drive-Under Tractor Manu Systems AG 22.01.2015 Version 1.2 I. WORLD OF ROBOTS... 3 A. Marke / Brand... 3 B. Artikel / Item... 3 II. AGVS Application... 4 A. Introduction... 4 B. E-Commerce
2015 S6 AGVS Drive-Under Tractor Manu Systems AG 22.01.2015 Version 1.2 I. WORLD OF ROBOTS... 3 A. Marke / Brand... 3 B. Artikel / Item... 3 II. AGVS Application... 4 A. Introduction... 4 B. E-Commerce
Autonomous Driving the uncrashable car? What it takes to make self-driving vehicles safe and reliable traffic participants
 Autonomous Driving the uncrashable car? What it takes to make self-driving vehicles safe and reliable traffic participants Dr. Frank Keck, MMB Conference 2018, Erlangen, Germany Internal Agenda Zukunft
Autonomous Driving the uncrashable car? What it takes to make self-driving vehicles safe and reliable traffic participants Dr. Frank Keck, MMB Conference 2018, Erlangen, Germany Internal Agenda Zukunft
UNIT V TRAFFIC MANAGEMENT
 UNIT V TRAFFIC MANAGEMENT TRANSPORTATION SYSTEM MANAGEMENT Transportation System Management (TSM) is a package of short term measures to make the most productive and cost-effective use of existing transportation
UNIT V TRAFFIC MANAGEMENT TRANSPORTATION SYSTEM MANAGEMENT Transportation System Management (TSM) is a package of short term measures to make the most productive and cost-effective use of existing transportation
Florida s Automated Vehicle Initiative
 Florida s Automated Vehicle Initiative Outline Overview of Autonomous Vehicles and Connected Vehicles Florida s Automated Vehicles Initiative Activities Automated Vehicles Connected Vehicles Technology
Florida s Automated Vehicle Initiative Outline Overview of Autonomous Vehicles and Connected Vehicles Florida s Automated Vehicles Initiative Activities Automated Vehicles Connected Vehicles Technology
INTELLIGENT TRANSPORTATION SYSTEMS SUMMARY
 Genesee County Shaping our Transportation Future Together 2035 Long Range Transportation Plan INTELLIGENT TRANSPORTATION SYSTEMS SUMMARY What is an Intelligent Transportation System? An Intelligent Transportation
Genesee County Shaping our Transportation Future Together 2035 Long Range Transportation Plan INTELLIGENT TRANSPORTATION SYSTEMS SUMMARY What is an Intelligent Transportation System? An Intelligent Transportation
SAE J3016 REVISIONS & SAE ADS/ADAS STANDARDS
 Document No. ITS/AD-14-10 (14th ITS/AD, 15 March 2018, agenda item 5-2) SAE J3016 REVISIONS & SAE ADS/ADAS STANDARDS Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards March
Document No. ITS/AD-14-10 (14th ITS/AD, 15 March 2018, agenda item 5-2) SAE J3016 REVISIONS & SAE ADS/ADAS STANDARDS Bill Gouse Director, Federal Program Development Global Ground Vehicle Standards March
Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition
 Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition Feng Guo No.1 Harbin Engineering University, China Peiji Wang No.2 Yuan Yin No.3 Xiaoyan Zheng No.4
Technical Layout of Harbin Engineering University UAV for the International Aerial Robotics Competition Feng Guo No.1 Harbin Engineering University, China Peiji Wang No.2 Yuan Yin No.3 Xiaoyan Zheng No.4
How to build an autonomous anything
 How to build an autonomous anything Jim Tung MathWorks Fellow MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Acting independently 9 Autonomous Technology Provides the
How to build an autonomous anything Jim Tung MathWorks Fellow MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Acting independently 9 Autonomous Technology Provides the
Consumer Electronics components and systems for automotive and industrial products: TRACE
 funded by Consumer Electronics components and systems for automotive and industrial products: TRACE TRACE a Catrene 2015 project Technology ReAdiness Process for Consumer Electronics 1 Necessity of TRACE
funded by Consumer Electronics components and systems for automotive and industrial products: TRACE TRACE a Catrene 2015 project Technology ReAdiness Process for Consumer Electronics 1 Necessity of TRACE
DESIGNATED US DOT AVPG MEETING
 Florida Department of TRANSPORTATION DESIGNATED US DOT AVPG MEETING CENTRAL FLORIDA AV PARTNERSHIP City of Orlando University of Central Florida Florida Polytechnic University FAMU-FSU College of Engineering
Florida Department of TRANSPORTATION DESIGNATED US DOT AVPG MEETING CENTRAL FLORIDA AV PARTNERSHIP City of Orlando University of Central Florida Florida Polytechnic University FAMU-FSU College of Engineering
Dr. Jochen Wagner 20th April 2018 WHAT THE CONSTRUCTION INDUSTRY SHOULD BE PREPARED FOR.
 Dr. Jochen Wagner 20th April 2018 WHAT THE CONSTRUCTION INDUSTRY SHOULD BE PREPARED FOR. THE ACTUAL REPUTATION OF THE CONSTRUCTION INDUSTRY. LONG CONSTRUCTION TIMES ESCALATING COST MISSING TEAM SPIRIT
Dr. Jochen Wagner 20th April 2018 WHAT THE CONSTRUCTION INDUSTRY SHOULD BE PREPARED FOR. THE ACTUAL REPUTATION OF THE CONSTRUCTION INDUSTRY. LONG CONSTRUCTION TIMES ESCALATING COST MISSING TEAM SPIRIT
FLEET SAFETY TECHNOLOGY. Risk Directory 2017/18
 FLEET SAFETY TECHNOLOGY Risk Directory 2017/18 Introduction According to the Association of British Insurers, the total cost of fleet motor claims in recent years exceeded 2 billion, the majority of which
FLEET SAFETY TECHNOLOGY Risk Directory 2017/18 Introduction According to the Association of British Insurers, the total cost of fleet motor claims in recent years exceeded 2 billion, the majority of which
Autonomous Drive. Restricted Circulation L&T Technology Services
 Autonomous Drive Restricted Circulation L&T Technology Services 2016 1 Projects Products Services WE COME FROM A LINEAGE OF INNOVATION & GROWTH Larsen & Toubro founded in 1938 by Danish engineers L&T is
Autonomous Drive Restricted Circulation L&T Technology Services 2016 1 Projects Products Services WE COME FROM A LINEAGE OF INNOVATION & GROWTH Larsen & Toubro founded in 1938 by Danish engineers L&T is
The SWRLing Future of OWL. Mark Greaves DARPA / IXO
 The SWRLing Future of OWL Mark Greaves DARPA / IXO In the Beginning DARPA Agent Mark Up Language (DAML) PE/Project Number: 62301E/ST-11 PAD ID NUMBER: 010033 PGM NUMBER: XAM8E DIRO APPROVAL: PGM MANAGER:
The SWRLing Future of OWL Mark Greaves DARPA / IXO In the Beginning DARPA Agent Mark Up Language (DAML) PE/Project Number: 62301E/ST-11 PAD ID NUMBER: 010033 PGM NUMBER: XAM8E DIRO APPROVAL: PGM MANAGER:
Application Note: Application of KEEL in a distributed diagnostic application in an automobile (09/04/2003)
") Application Note: Application of KEEL in a distributed diagnostic application in an automobile (09/04/2003) Objective: Today's automobiles are becoming very complex. They are no longer simply mechanical
Application Note: Application of KEEL in a distributed diagnostic application in an automobile (09/04/2003) Objective: Today's automobiles are becoming very complex. They are no longer simply mechanical
FUNCTIONAL SAFE STAHLDATEN SERVICE FOR AUTOMATED DRIVING
 FUNCTIONAL SAFE STAHLDATEN SERVICE FOR AUTOMATED DRIVING ConCarExpo 05./06.07.2017, Berlin Uwe Beher, ESG Elektroniksystem- und Logistik-GmbH Thomas Weyrath, ESG Elektroniksystem- und Logistik-GmbH AGENDA
FUNCTIONAL SAFE STAHLDATEN SERVICE FOR AUTOMATED DRIVING ConCarExpo 05./06.07.2017, Berlin Uwe Beher, ESG Elektroniksystem- und Logistik-GmbH Thomas Weyrath, ESG Elektroniksystem- und Logistik-GmbH AGENDA
BRE: Energy Management of Buildings & Renewable Energy Systems using BIM
 BRE: Energy Management of Buildings & Renewable Energy Systems using BIM Nick Tune Director BRE, BuildingSMART UK & International Part of the BRE Trust Energy Performance Gaps: The Need for a user in the
BRE: Energy Management of Buildings & Renewable Energy Systems using BIM Nick Tune Director BRE, BuildingSMART UK & International Part of the BRE Trust Energy Performance Gaps: The Need for a user in the
FeedMAP Validation Results
 FeedMAP Validation Results Final Workshop 9.10.2008 Trento, Italy Dr. Bernd Thomas Dr. Jan Löwenau BMW Group Forschung und Technik Focus of Technical Validation Validation is ensuring "you built the right
FeedMAP Validation Results Final Workshop 9.10.2008 Trento, Italy Dr. Bernd Thomas Dr. Jan Löwenau BMW Group Forschung und Technik Focus of Technical Validation Validation is ensuring "you built the right
Testing of level-3 Systems
 Testing of level-3 Systems stepping through the current PEGASUS approach Dr. Helmut Schittenhelm 9th November 2017 Starting point: Approval-Trap * Up to now, system behavior in traffic is considered a
Testing of level-3 Systems stepping through the current PEGASUS approach Dr. Helmut Schittenhelm 9th November 2017 Starting point: Approval-Trap * Up to now, system behavior in traffic is considered a
ROBOTIC ROADWORKS & EXCAVATION SYSTEM
 ROBOTIC ROADWORKS & EXCAVATION SYSTEM Ali Asmari PhD Senior Robotics Engineer Artificial Intelligence & Machine Learning Challenges With Traditional Excavation Methods Dangerous Underground Assets Road
ROBOTIC ROADWORKS & EXCAVATION SYSTEM Ali Asmari PhD Senior Robotics Engineer Artificial Intelligence & Machine Learning Challenges With Traditional Excavation Methods Dangerous Underground Assets Road
A Study of an Agricultural Ontology Model for an Intelligent Service in a Vertical Farm
 A Study of an Agricultural Ontology Model for an Intelligent Service in a Vertical Farm Taehyung Kim, NamJin Bae, MyeongBae Lee, Changsun Shin, Jangwoo Park and Yongyun Cho Dept. Information and Communication
A Study of an Agricultural Ontology Model for an Intelligent Service in a Vertical Farm Taehyung Kim, NamJin Bae, MyeongBae Lee, Changsun Shin, Jangwoo Park and Yongyun Cho Dept. Information and Communication
What is ADAS? Agneta Sjögren Volvo Technology
 What is ADAS? Agneta Sjögren BESTUFS Athens 2008-06-12 VTEC within the Volvo Group Business Areas AB Volvo Mack Trucks Renault Trucks Volvo Trucks BA Asia Incl. Nissan Diesel Buses Construction Equipment
What is ADAS? Agneta Sjögren BESTUFS Athens 2008-06-12 VTEC within the Volvo Group Business Areas AB Volvo Mack Trucks Renault Trucks Volvo Trucks BA Asia Incl. Nissan Diesel Buses Construction Equipment
INUDSTRY 4.0 SMART FACTORY
 INUDSTRY 4.0 SMART FACTORY How can we categorize Smart Factory with regard to industry 4.0 and other technologies Industry 4.0 Marketing R&D Production Logistics/SCM Data Analytics Real-time product data
INUDSTRY 4.0 SMART FACTORY How can we categorize Smart Factory with regard to industry 4.0 and other technologies Industry 4.0 Marketing R&D Production Logistics/SCM Data Analytics Real-time product data
Big Data Analytics, Connected Vehicles and Smart Cities. Bob McQueen, Kyra Solutions
 Big Data Analytics, Connected Vehicles and Smart Cities Bob McQueen, Kyra Solutions 1 Topics What is a smart city? The importance of transportation in a smart city What is Big data? What are big data analytics?
Big Data Analytics, Connected Vehicles and Smart Cities Bob McQueen, Kyra Solutions 1 Topics What is a smart city? The importance of transportation in a smart city What is Big data? What are big data analytics?
Low latency broadband communication between vessels and port landside: perspectives and challenges Paolo Pagano (CNIT, Livorno Port Authority)
") Low latency broadband communication between vessels and port landside: perspectives and challenges Paolo Pagano (CNIT, Livorno Port Authority) Credits: Cap. Ubaldo Sgherri Future Evolution of Marine Communication
Low latency broadband communication between vessels and port landside: perspectives and challenges Paolo Pagano (CNIT, Livorno Port Authority) Credits: Cap. Ubaldo Sgherri Future Evolution of Marine Communication
Industry Innovations with SAP Leonardo: Mill Products Industry
 Industry Innovations with SAP Leonardo: Mill Products Industry Stefan Soeller, Industry Business Unit Mill Products & Mining, SAP PUBLIC Agenda Digitalization in Mill Products Mill Products Use Cases for
Industry Innovations with SAP Leonardo: Mill Products Industry Stefan Soeller, Industry Business Unit Mill Products & Mining, SAP PUBLIC Agenda Digitalization in Mill Products Mill Products Use Cases for
LECTURE 21: TRANSPORTATION TECHNOLOGIES: INTELLIGENT TRANSPORTATION SYSTEMS
 1.201J/11.545J/ESD.210J Transportation Systems Fall 2006 LECTURE 21: TRANSPORTATION TECHNOLOGIES: INTELLIGENT TRANSPORTATION SYSTEMS DISPLAYS SPEAKER: Joseph M. Sussman MIT November 21, 2006 Technology
1.201J/11.545J/ESD.210J Transportation Systems Fall 2006 LECTURE 21: TRANSPORTATION TECHNOLOGIES: INTELLIGENT TRANSPORTATION SYSTEMS DISPLAYS SPEAKER: Joseph M. Sussman MIT November 21, 2006 Technology
Artificial Intelligence and Machine Learning in IoT
 Artificial Intelligence and Machine Learning in IoT Dr. Christine Preisach Vice President Data Science in IoT PUBLIC What is IoT: Examples and Facts Save time and improve quality of life with: Optimized
Artificial Intelligence and Machine Learning in IoT Dr. Christine Preisach Vice President Data Science in IoT PUBLIC What is IoT: Examples and Facts Save time and improve quality of life with: Optimized
Driver Assistance Systems Status Quo and Future Impact on PTI Preliminary Findings of the vfss-group
 Plenary Session One Presentation 2 Driver Assistance Systems Status Quo and Future Impact on PTI Preliminary Findings of the vfss-group Frank Leimbach Divisional Director, DEKKRA Automobil GmbH 2013 CITA
Plenary Session One Presentation 2 Driver Assistance Systems Status Quo and Future Impact on PTI Preliminary Findings of the vfss-group Frank Leimbach Divisional Director, DEKKRA Automobil GmbH 2013 CITA
Maritime Collision Detection and Advisory System (MCDAS) - Improving Situation Awareness and Enabling Lean Manning
 - Improving Situation Awareness and Enabling Lean Manning") Maritime Collision Detection and Advisory System (MCDAS) - Improving Situation Awareness and Enabling Lean Manning Andrew Yue Kwok Wai Master of Engineering (Computational Intelligence), Nanyang Technological
Maritime Collision Detection and Advisory System (MCDAS) - Improving Situation Awareness and Enabling Lean Manning Andrew Yue Kwok Wai Master of Engineering (Computational Intelligence), Nanyang Technological
Design Principles for Advanced Driver Assistance Systems: Keeping Drivers In-the-Loop
 Transmitted by the expert from Canada Informal Document No. GRE-64-07 (64th GRE, 4-7 October 2010 agenda items 21(a)(c)) Design Principles for Advanced Driver Assistance Systems: Keeping Drivers In-the-Loop
Transmitted by the expert from Canada Informal Document No. GRE-64-07 (64th GRE, 4-7 October 2010 agenda items 21(a)(c)) Design Principles for Advanced Driver Assistance Systems: Keeping Drivers In-the-Loop
LOGISTICS 4.0: THE MOST IMPORTANT TECHNOLOGICAL TRENDS
 SYSTEMS LOGISTICS 4.0: THE MOST IMPORTANT TECHNOLOGICAL TRENDS Based on The Logistics Trend Radar 2016 by DHL Introduction Logistics is undergoing an important transformation. The industry faces serious
SYSTEMS LOGISTICS 4.0: THE MOST IMPORTANT TECHNOLOGICAL TRENDS Based on The Logistics Trend Radar 2016 by DHL Introduction Logistics is undergoing an important transformation. The industry faces serious
Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing.
 in autonomous vehicles for alerting driver during overtaking and lane changing.") Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing. CS5760: Topic Assignment 2 Topic Paper Abhishek Shriram Umachigi Department of Electrical
Human Computer Interaction (HMI) in autonomous vehicles for alerting driver during overtaking and lane changing. CS5760: Topic Assignment 2 Topic Paper Abhishek Shriram Umachigi Department of Electrical
Traffic Control and Management with Vehicle Automation and Connectivity for the 21st Century
 Traffic Control and Management with Vehicle Automation and Connectivity for the 21st Century Baher Abdulhai, Ph.D., P.Eng., Professor Soheil Alizadeh, Ph.D. Candidate Lina Elmorshedy, Ph.D. Student Ahmed
Traffic Control and Management with Vehicle Automation and Connectivity for the 21st Century Baher Abdulhai, Ph.D., P.Eng., Professor Soheil Alizadeh, Ph.D. Candidate Lina Elmorshedy, Ph.D. Student Ahmed
CITYMOBIL ADVANCED ROAD TRANSPORT FOR THE URBAN ENVIRONMENT
 CITYMOBIL ADVANCED ROAD TRANSPORT FOR THE URBAN ENVIRONMENT Jan P. van Dijke Senior Project Manager, TNO Science and Technology Advanced Chassis and Transport Systems P.O. Box 756, 5700 AT, Helmond, The
CITYMOBIL ADVANCED ROAD TRANSPORT FOR THE URBAN ENVIRONMENT Jan P. van Dijke Senior Project Manager, TNO Science and Technology Advanced Chassis and Transport Systems P.O. Box 756, 5700 AT, Helmond, The
CCE Construction Cost Estimating
 CCE Construction Cost Estimating TPAC 2016 Francisco Regateiro Linked Building Data Community Group 19 September 2016 Context Built Environment Sector (AEC-FM) The built environment consists of buildings,
CCE Construction Cost Estimating TPAC 2016 Francisco Regateiro Linked Building Data Community Group 19 September 2016 Context Built Environment Sector (AEC-FM) The built environment consists of buildings,
Autonomy Requirements for Smart Vehicles
 Autonomy Requirements for Smart Vehicles Emil Vassev April 24, 2017 09/08/2017 Lero 2015 1 Outline Autonomy Autonomous Vehicles and Safety Autonomy Requirements Engineering (ARE) KnowLang The ARE Formal
Autonomy Requirements for Smart Vehicles Emil Vassev April 24, 2017 09/08/2017 Lero 2015 1 Outline Autonomy Autonomous Vehicles and Safety Autonomy Requirements Engineering (ARE) KnowLang The ARE Formal
Florida s Automated Vehicle Initiative
 Florida s Automated Vehicle Initiative Outline Advancement of the automobile Overview of autonomous vehicles and connected vehicles Benefits of planning for automated vehicles Federal and Florida initiatives
Florida s Automated Vehicle Initiative Outline Advancement of the automobile Overview of autonomous vehicles and connected vehicles Benefits of planning for automated vehicles Federal and Florida initiatives
Personalization of Itineraries search using Ontology and Rules to Avoid Congestion in Urban Areas
 Personalization of Itineraries search using Ontology and Rules to Avoid Congestion in Urban Areas Amir ZIDI*. Amna BOUHANA**. Afef FEKIH***. Mourad ABED* * LAMIH, University of Valenciennes and Hainaut-Cambrésis,
Personalization of Itineraries search using Ontology and Rules to Avoid Congestion in Urban Areas Amir ZIDI*. Amna BOUHANA**. Afef FEKIH***. Mourad ABED* * LAMIH, University of Valenciennes and Hainaut-Cambrésis,
Smart Factory The Heart of the Digital Transformation Era
 Smart Factory The Heart of the Digital Transformation Era Dr. Jörg Pirron PROTEMA Consulting Services, Germany 2017 Epicor Software Corporation PROTEMA It is personalities, not principles that move the
Smart Factory The Heart of the Digital Transformation Era Dr. Jörg Pirron PROTEMA Consulting Services, Germany 2017 Epicor Software Corporation PROTEMA It is personalities, not principles that move the
drone detection and neutralization system
 drone detection and neutralization system Response to growing market needs Demand for non-military counter-drone systems is driven by: the sudden growth of the unregulated drone market is causing more
drone detection and neutralization system Response to growing market needs Demand for non-military counter-drone systems is driven by: the sudden growth of the unregulated drone market is causing more
Materialising Factories 4.0. Digital Representation of Factories 4.0. Paolo Pedrazzoli
 Materialising Factories 4.0 Digital Representation of Factories 4.0 Paolo Pedrazzoli the Automation pyramid concept, traditionally used to describe the different system levels of an overall automation
Materialising Factories 4.0 Digital Representation of Factories 4.0 Paolo Pedrazzoli the Automation pyramid concept, traditionally used to describe the different system levels of an overall automation